

Bipedal semi-passive walker and walking control method thereof
A walking device, semi-passive technology, applied in the field of walking equipment, can solve the problems of high energy consumption, can not simulate the lateral movement process of human walking process, and is not suitable for practical applications, so as to reduce the connection and control, avoid the problem of side fall, The effect of good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
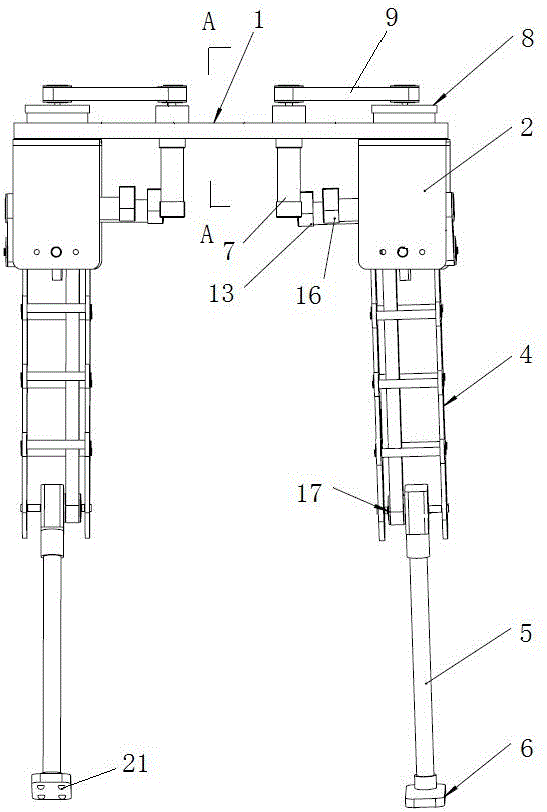
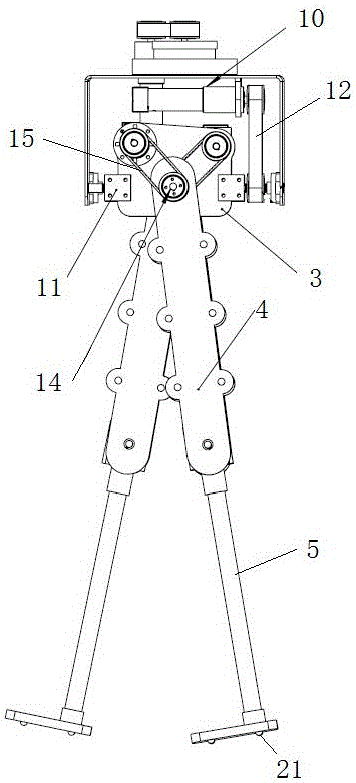
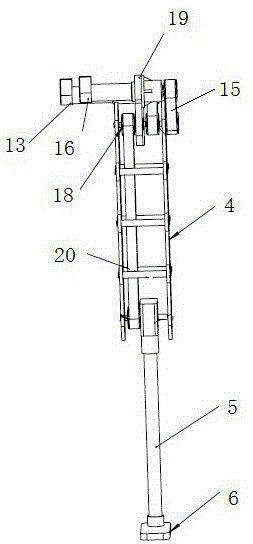
[0043] Such as figure 1 The above is a schematic structural diagram of an embodiment of the biped semi-passive walking device of the present invention. The biped semi-passive walker of the present embodiment comprises a hip and two legs which are respectively arranged on the left and right sides of the hip, and the hip comprises a hip balance board 1 and is respectively arranged on the lower side at both ends of the hip balance board 1 The stand 2. The leg comprises connecting plate 3, thigh 4 and calf 5, and the bottom of calf 5 is provided with pseudofoot plate 6, and thigh 4 is hingedly connected with connecting plate 3, and calf 5 is hingedly connected with thigh 4 and forms ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More