Formation transformation method for multi-robot system based on multi-motion modal and multi-viewpoint geometry
A multi-robot, multi-movement technology, applied in the field of robotics, can solve the problems of poor formation transformation ability and weak applicability, and achieve the effect of high-precision formation transformation function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0020] Embodiment 1: The multi-robot system formation transformation method based on the multi-motion mode multi-viewpoint geometry is used for a multi-robot system with at least two leading machines and several following machines, each robot is equipped with a camera, and the camera is equipped with The image taken is the image of the robot; the conversion method comprises the following steps:
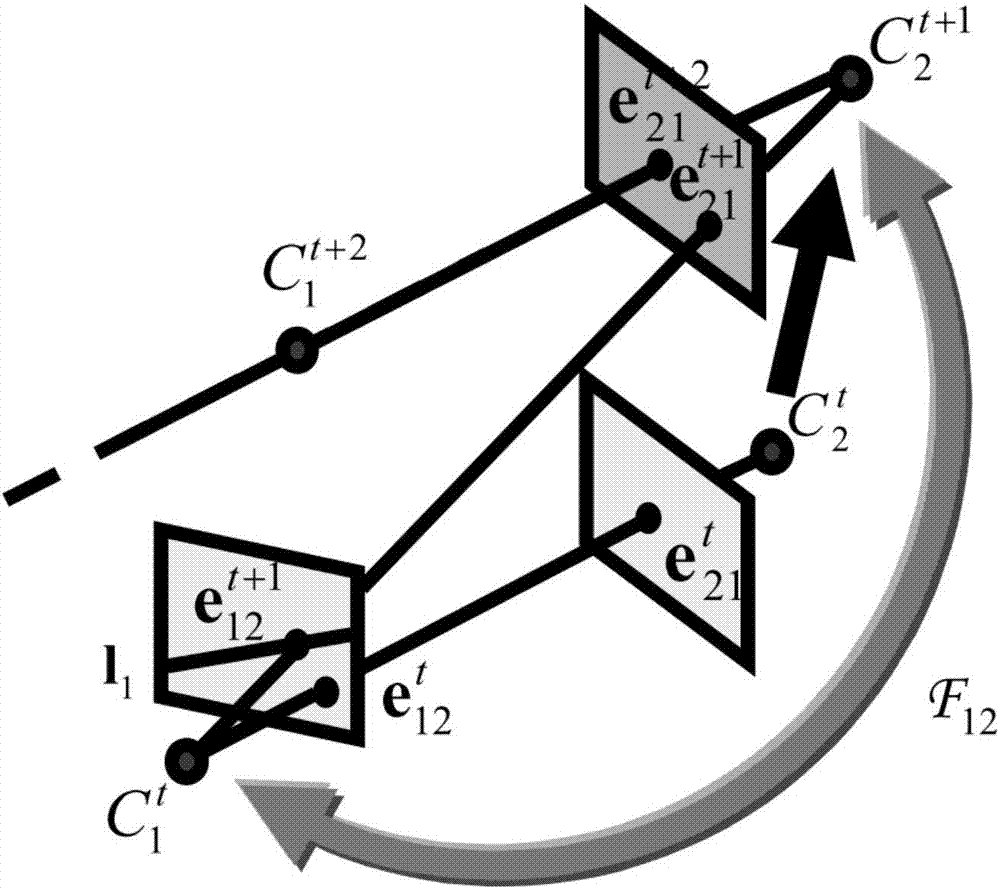
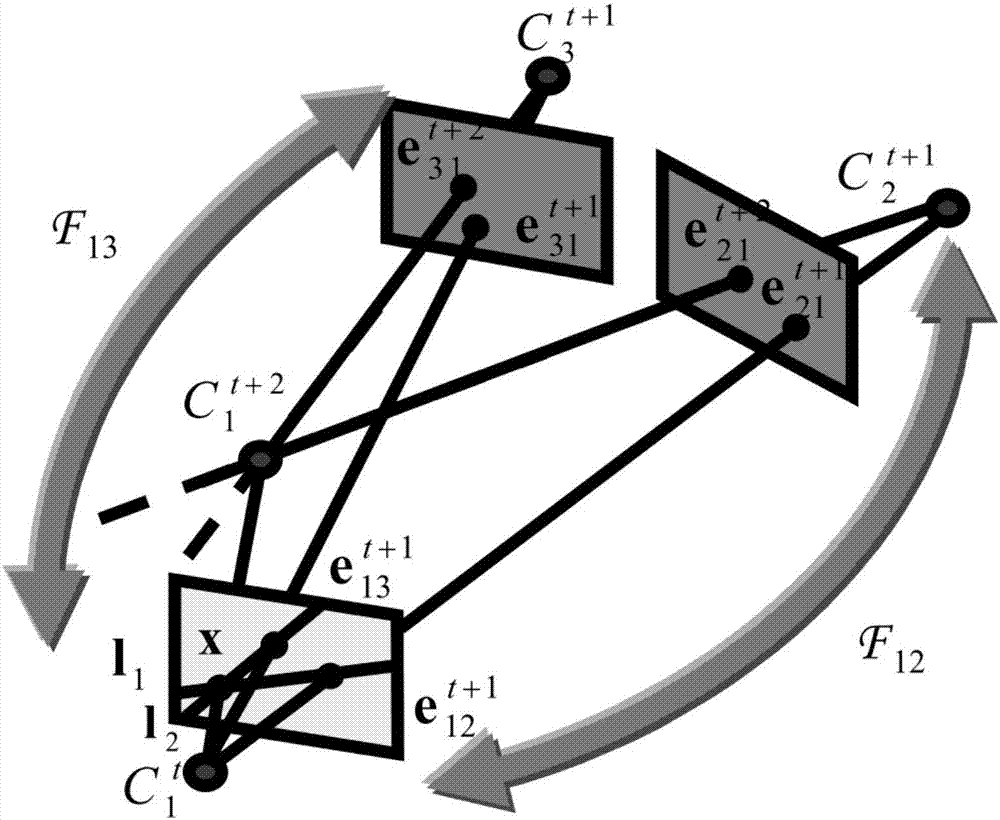
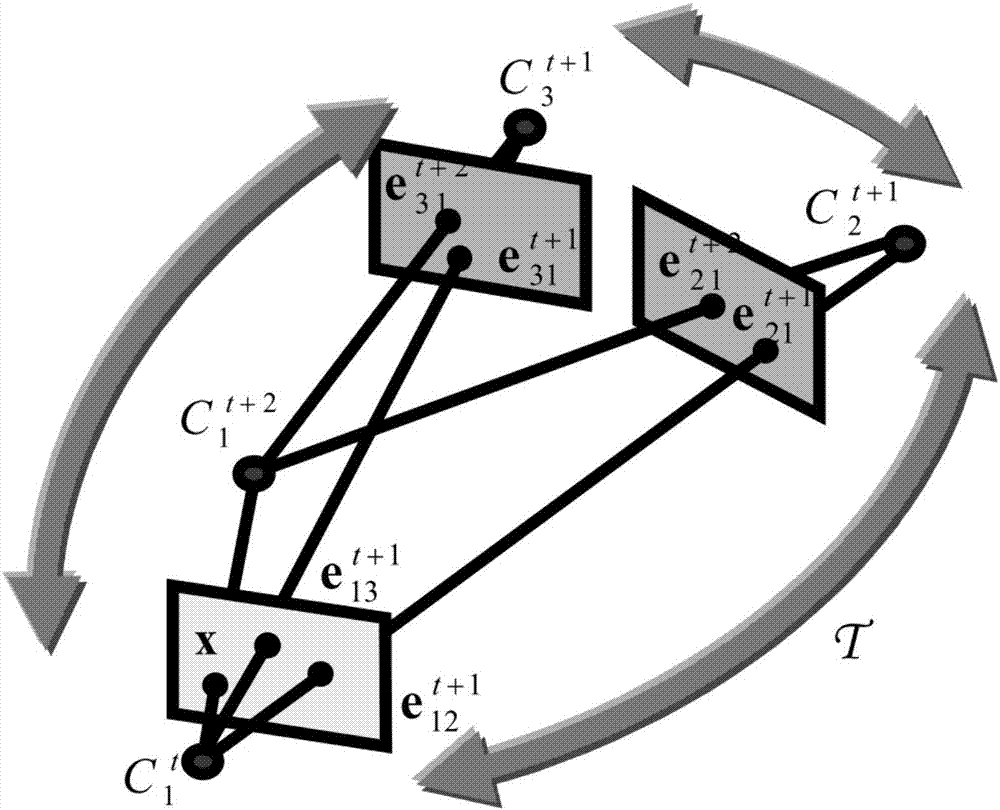
[0021] (1) Calculate the geometric tensor of the multi-robot system target formation based on fusion multi-motion mode and multi-viewpoint geometry: firstly, model the motion trajectory of the robot with the projective camera, and select the B-Spline curve model to represent the robot in the Static, linear motion, and curved motion states and motion trajectories; establish the mapping relationship between spatial points and image points, and convert nonlinear mapping into linear mapping; thirdly, construct an expression that integrates multi-motion modal multi-viewpoint geometry and an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com