

A method for calibrating UAV runway heading and center coordinates
A technology of center coordinates and calibration method, applied in the field of aviation drones, can solve the problems of calibration, difficult operation, and inability to carry out runways.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0071] (1) Place the base station at any point within 2km from the center of the runway;
[0072] (2) Initialize the base station, configure serial communication parameters, baud rate 9600, 8 data bits, 1 stop bit, no parity check;
[0073] (3) Set the base station to collect 900 static coordinate points for itself, so as to obtain the values of longitude, latitude, and altitude;
[0074] (4) After the base station obtains the static coordinate point, the differential code can be generated and sent to the mobile station through the UHF radio station at a frequency of once every 5 seconds;
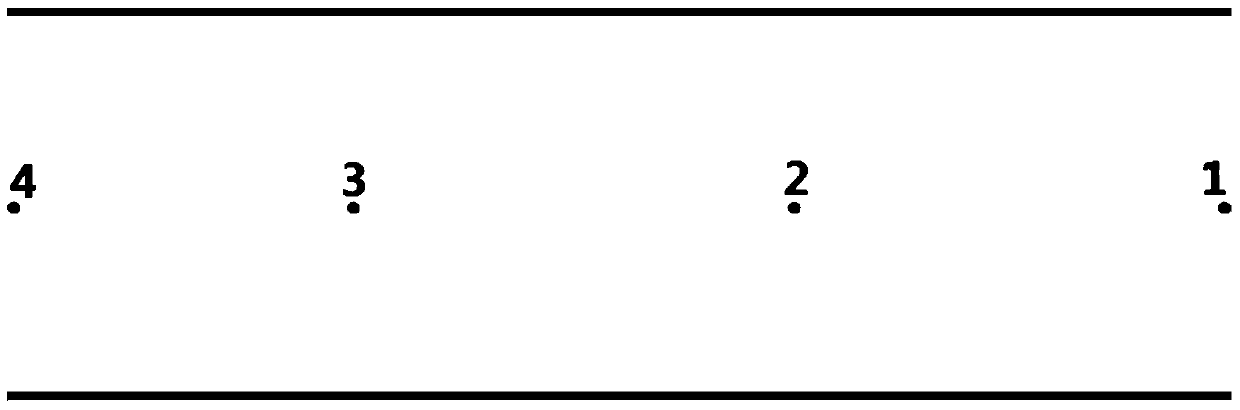
[0075] (5) Select four points sequentially on the center line of the runway, including the start point, end point and any two points on the center line of the runway, such as figure 2 shown.
[0076] (6) Initialize the mobile station, configure serial communication parameters, baud rate 9600, 8 data bits, 1 stop bit, no parity;
[0077] (7) Place the mobile station on the four selecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More