

Robotic control of imaging devices with optical shape sensing
一种机器人、中成像的技术,应用在医学仪器领域,能够解决组织损伤等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
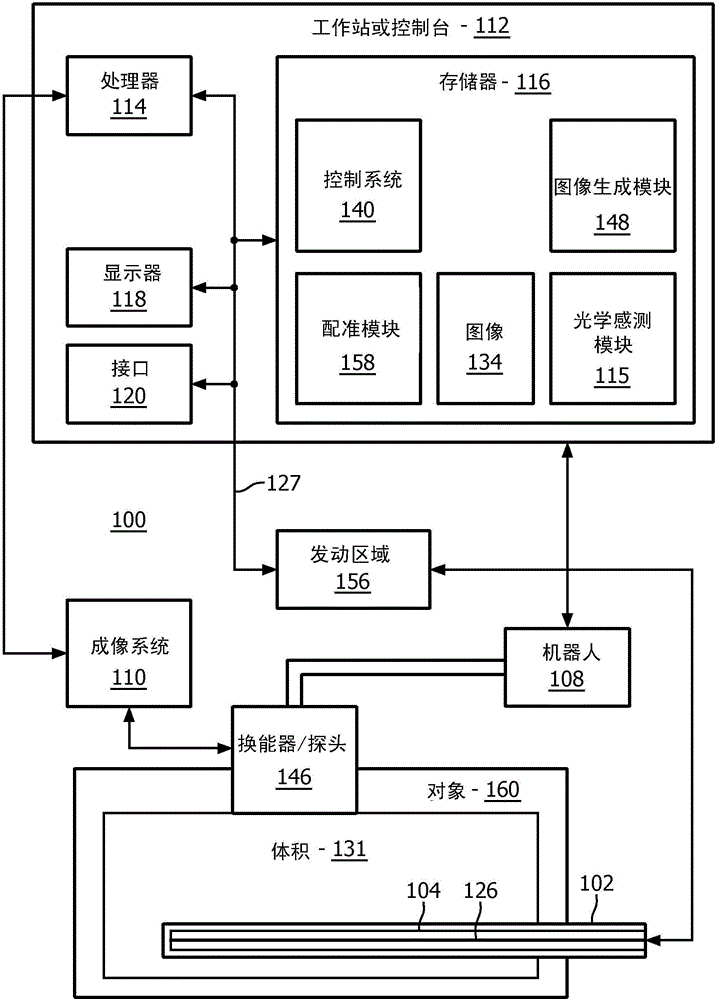
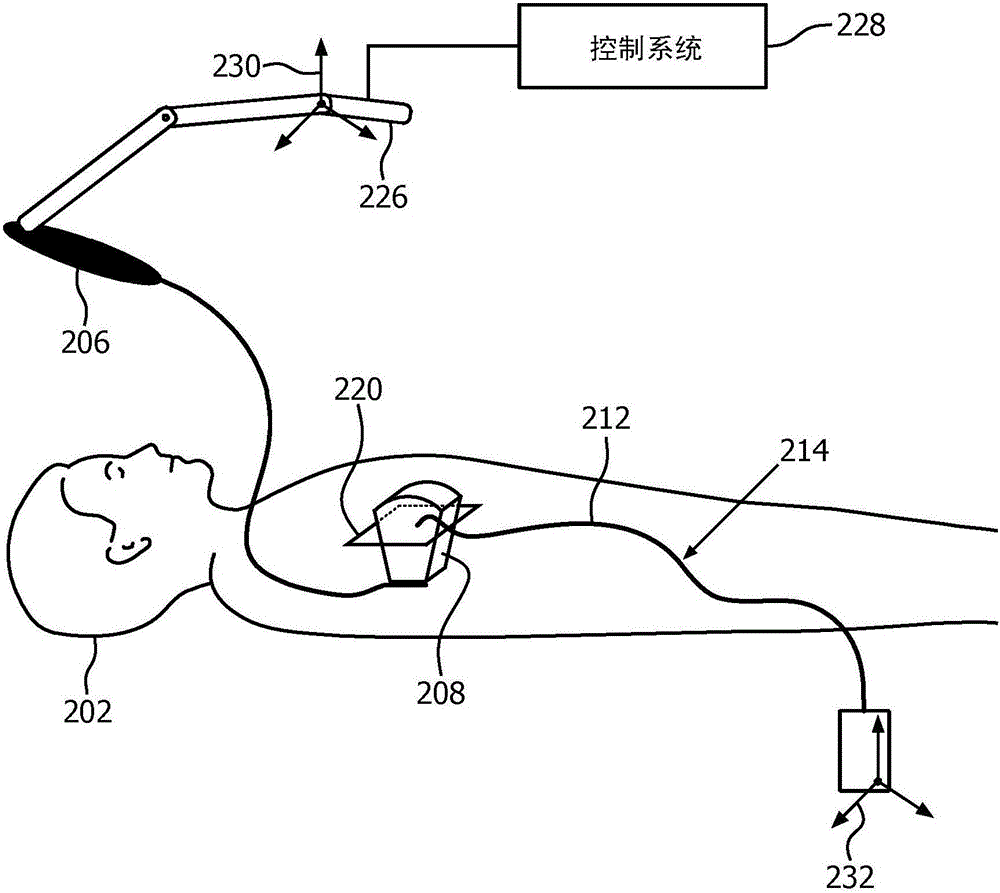
[0016] In accordance with the present principles, systems, devices, and methods are described that provide control of robots using optical shape sensing technology. Image guidance of robotically controlled imaging devices solves the aforementioned mapping problem by allowing the operator to select a target from the most intuitive frame (the image frame). According to the present principles, robotic control of an ultrasound probe is provided to intelligently track an optical shape sensing (OSS) enabled catheter or other device. A system and method are provided to visualize devices during medical procedures by sensing the shapes of the devices, registering the shapes with a robot coordinate frame, and guiding a robot to bring those devices into the field of view of an imaging device. The present principle allows repositioning of the imaging device to reach targets that are not visible in the current view.
[0017] An optical shape sensing interventional device can be used to cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More