

A two-degree-of-freedom limited exoskeleton ankle joint and its application
An ankle joint and exoskeleton technology, which is applied to the two-degree-of-freedom limited exoskeleton ankle joint and its application fields, can solve problems such as difficult promotion, inability to simulate human ankle joints well, and different positions of the rotation center
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
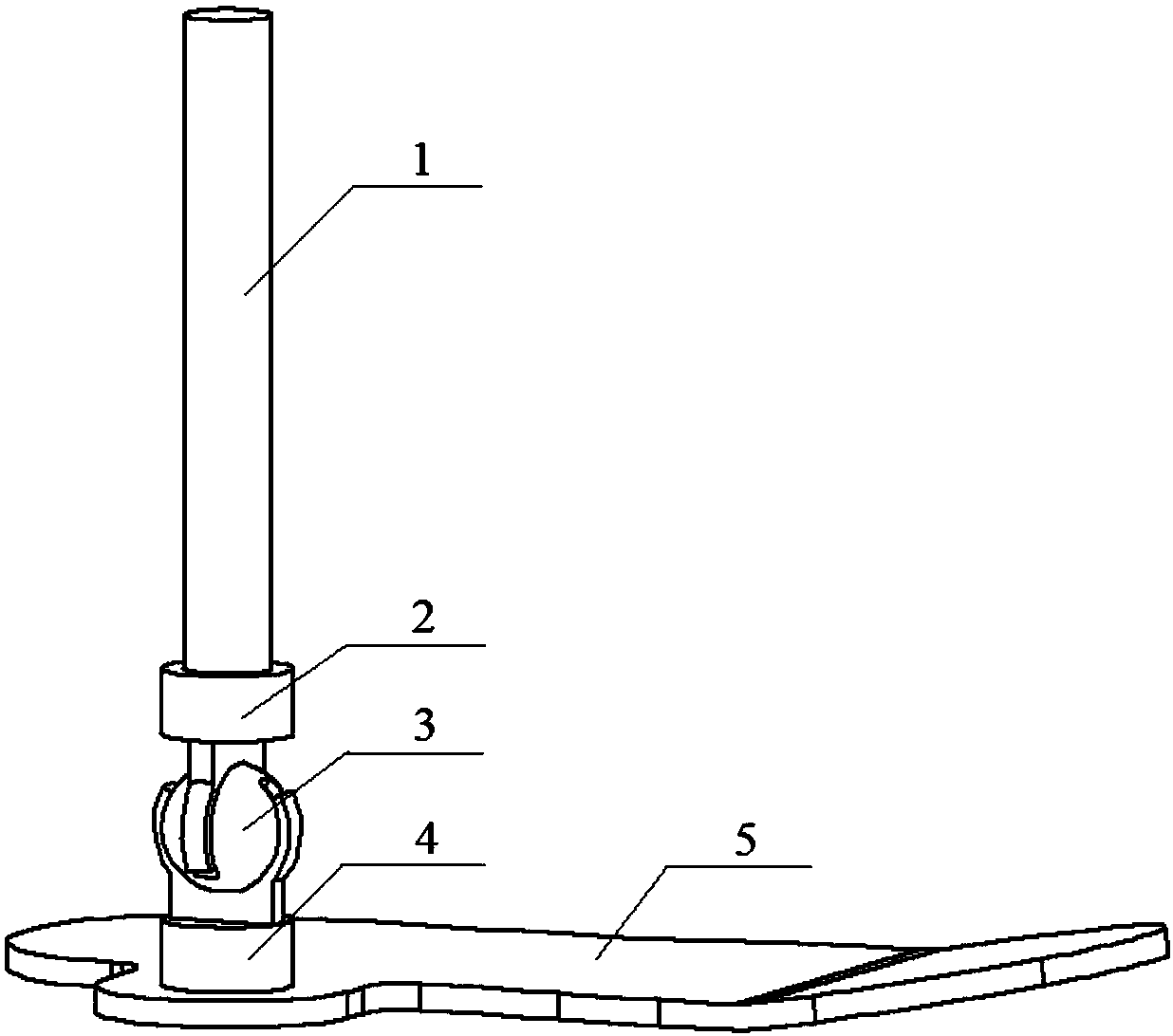
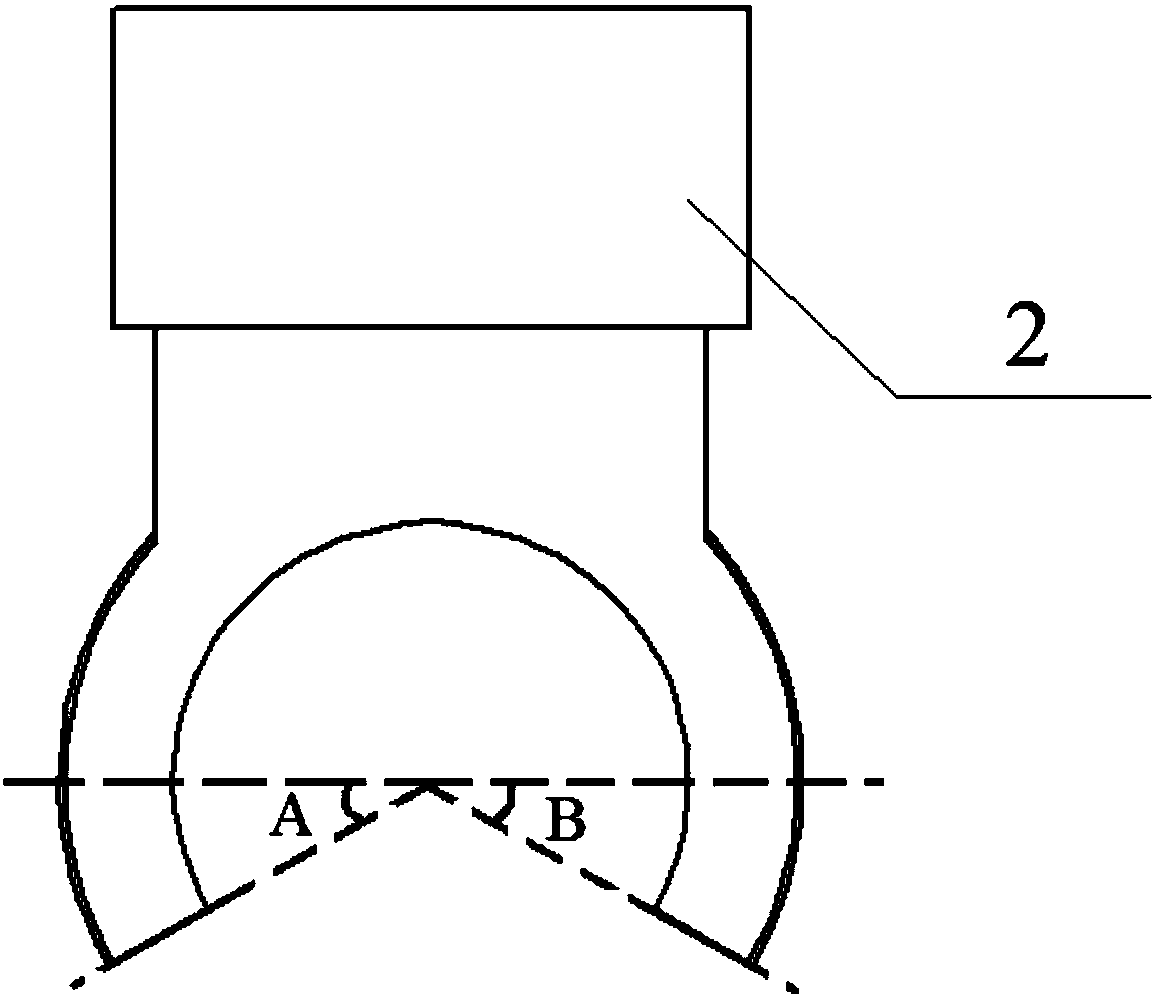
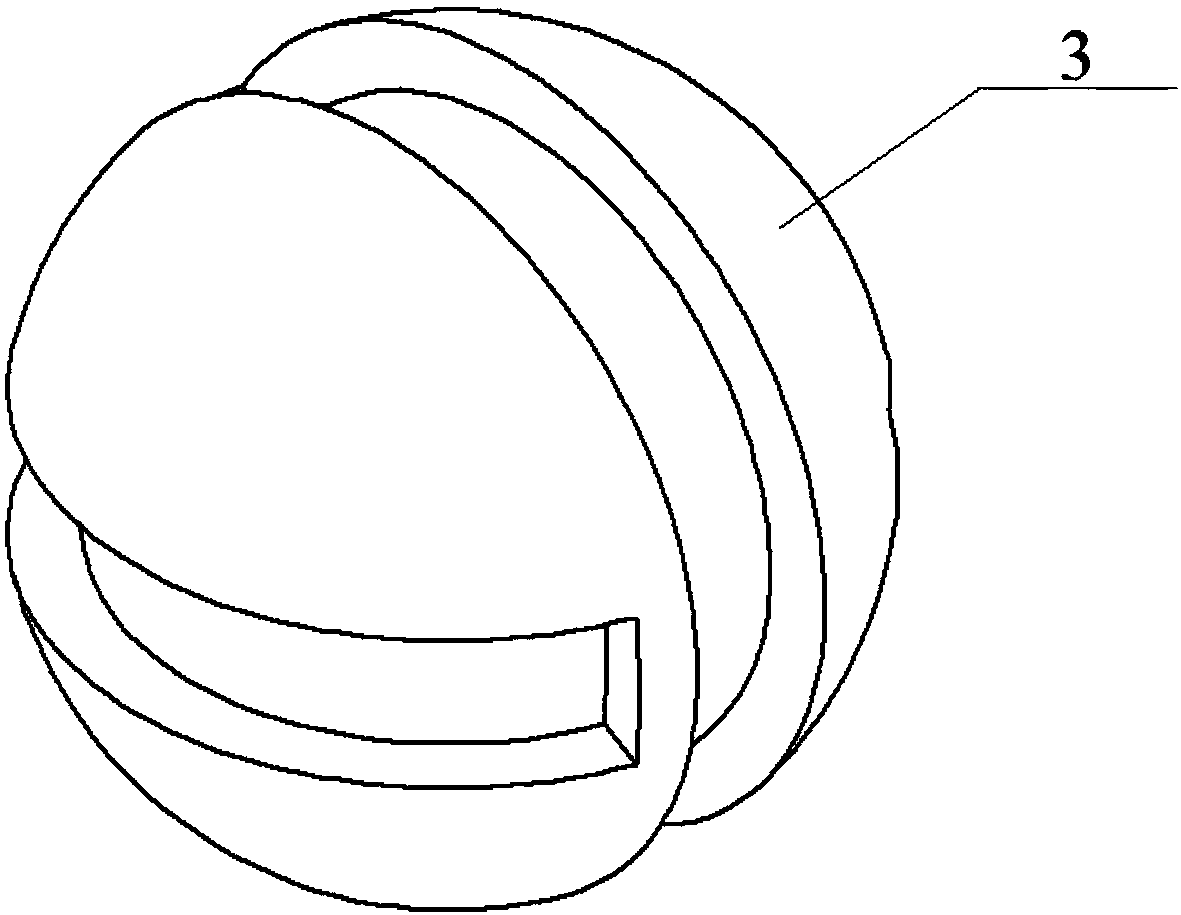
[0025] like figure 1 As shown, the two-degree-of-freedom limiting exoskeleton ankle joint of the present invention includes a calf bar 1, an upper part of the ankle joint 2, a transfer ball 3, a lower part of the ankle joint 4 and a sole 5, and the lower end of the calf bar 1 is connected to the upper part of the ankle joint. The upper end of the part 2 is welded, the lower end of the upper part 2 of the ankle joint forms a hinged fit connection with the transfer ball 3, the transfer ball 3 forms a hinged fit connection with the upper end of the lower part 4 of the ankle joint, and the connection between the upper part 2 of the ankle joint and the transfer ball 3 The hinge direction between the transfer ball 3 and the ankle joint lower part 4 is vertical, so that the ankle joint upper part 2 forms an approximate ball hinge with the ankle joint lower par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More