

Robotic system with reconfigurable end effector assembly
A technology of robot system and manipulator, applied in the field of robot system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
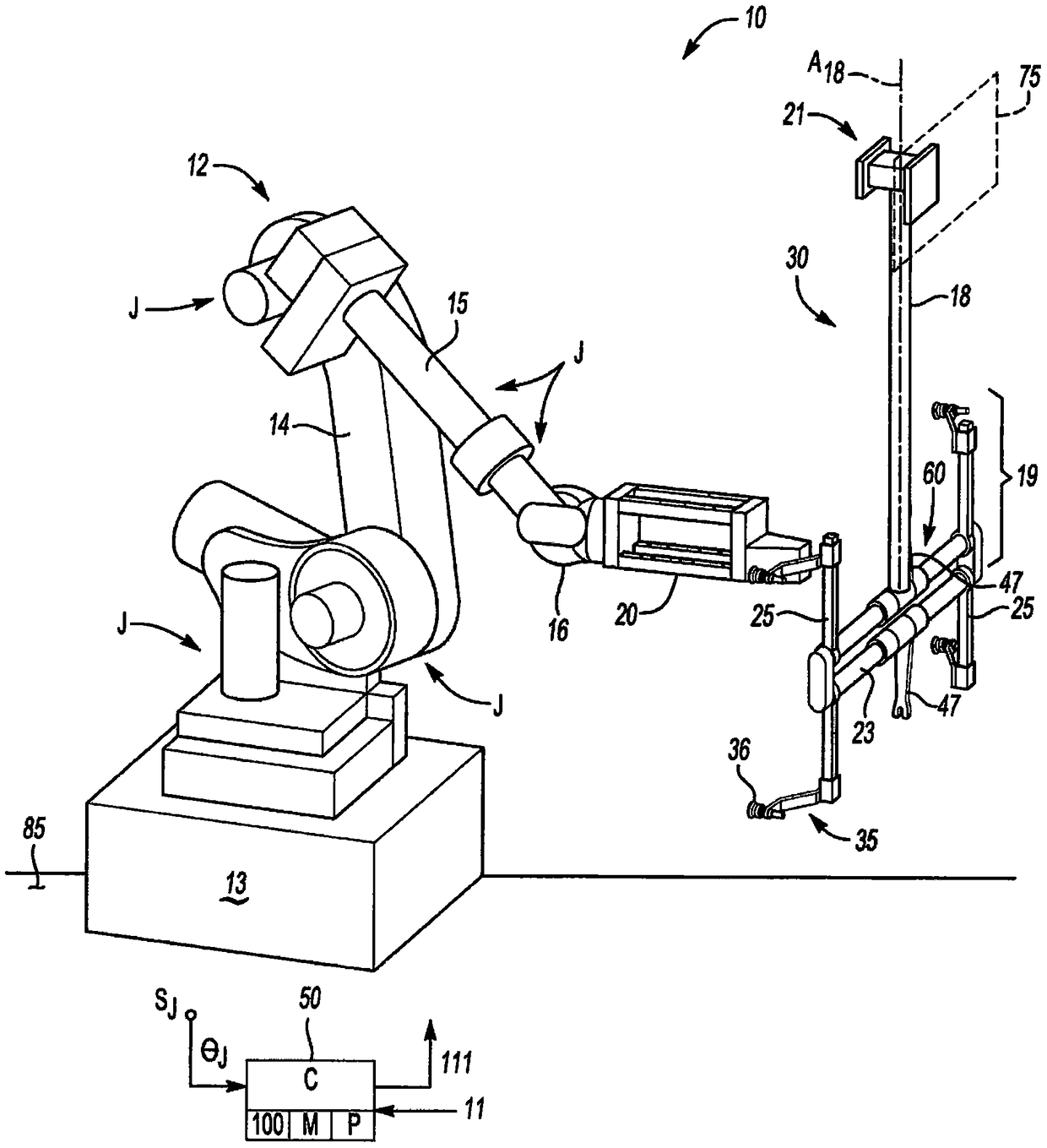
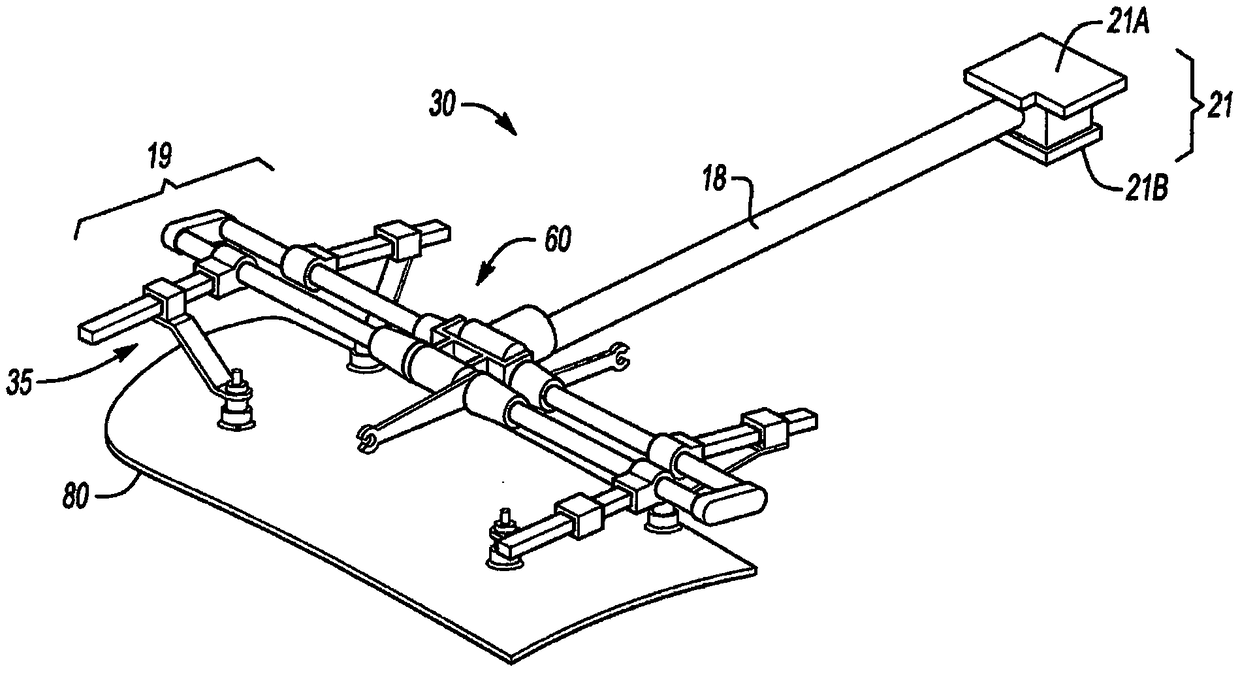
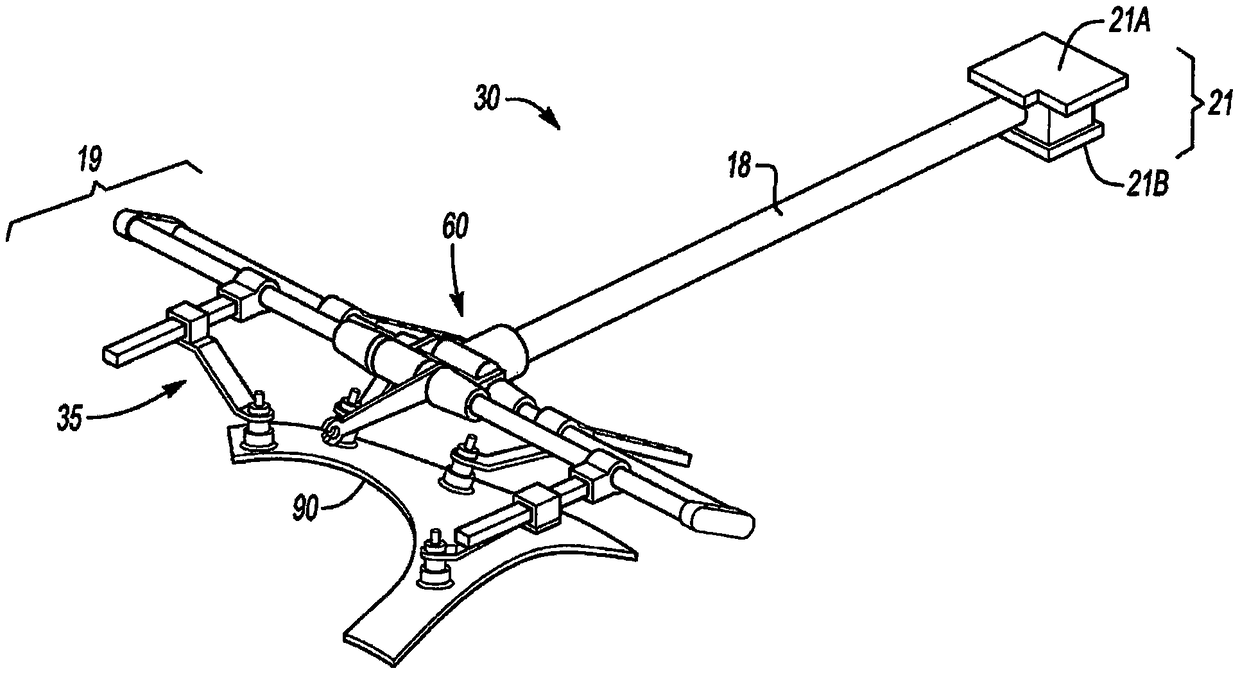
[0053] Referring to the drawings, wherein like reference numerals designate like parts throughout the several views, in figure 1 The robotic system 10 is schematically shown in . The robot system 10 includes a multi-axis industrial robot 12, Figure 5 and 6 The configuration tool 20 best shown in , and referenced below Figure 2A-4 and 7 describe the reconfigurable end effector assembly 30 in detail. Overall operational control of the robotic system 10 may be achieved by the controller (C) 50 via execution of the method 100, an example implementation of which is at Figure 8 shown in . Robotic system 10 may be included in Figure 9-11E The configuration rack 75, 175 described in detail in, the method 200 of using the configuration rack 75, 175 in Figure 12 shown in .
[0054] figure 1 The robot 12 may be implemented as a conventional 6-axis industrial robot as shown, and thus may include a fixed or moving base 13 and a plurality of robot joints J, at least some of whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More