

A Multi-Agent Alliance Forming Method Based on Balanced Alliance
A multi-agent, intelligent body technology, applied in the field of intelligent robots, can solve the problems of communication congestion, the inability to form alliances, and the inconsistency of the actual situation, to save time, improve flexibility and effectiveness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0030] The present invention provides a method for forming a multi-agent alliance based on a balanced alliance. The principle of the present invention is:
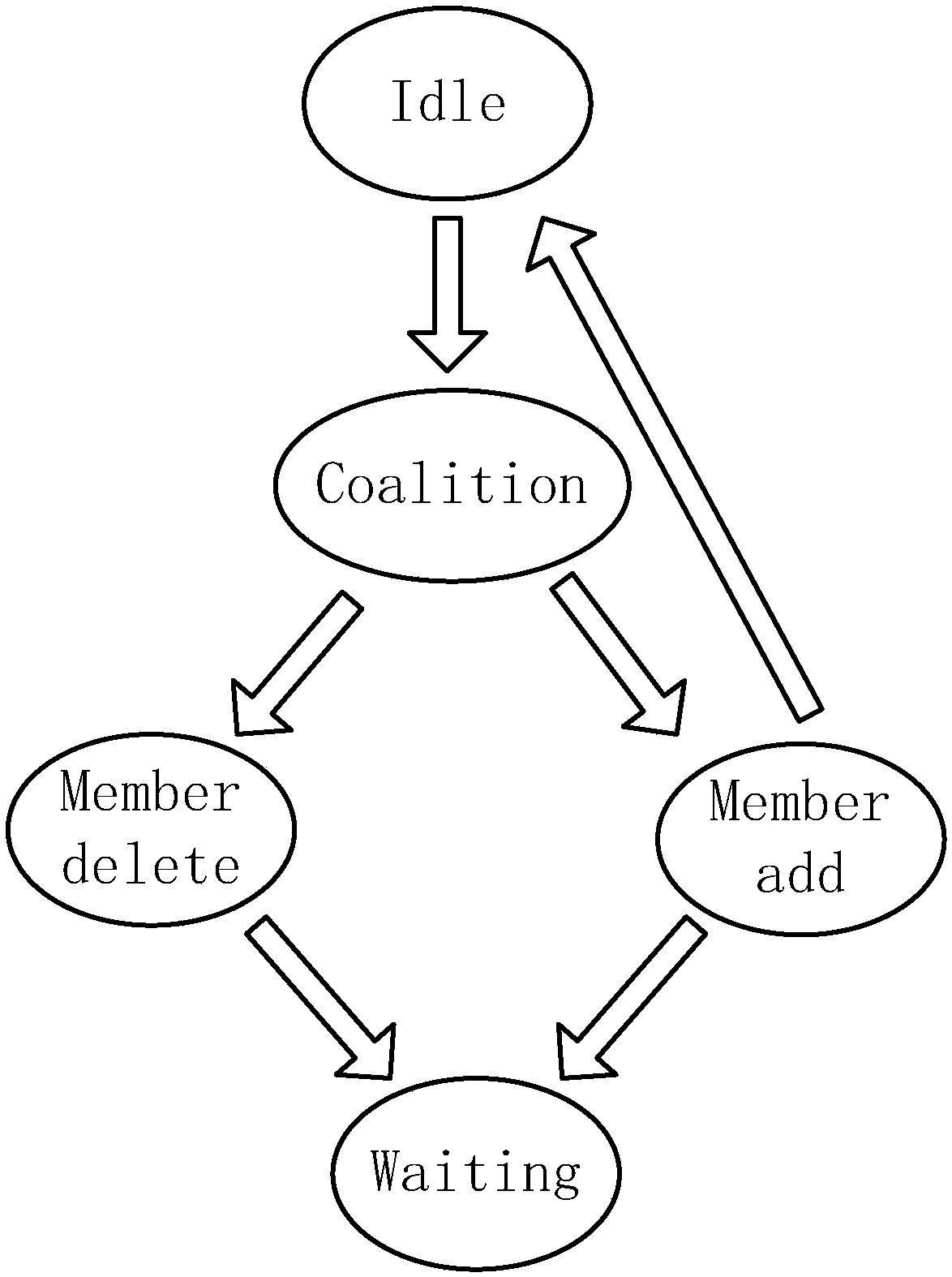
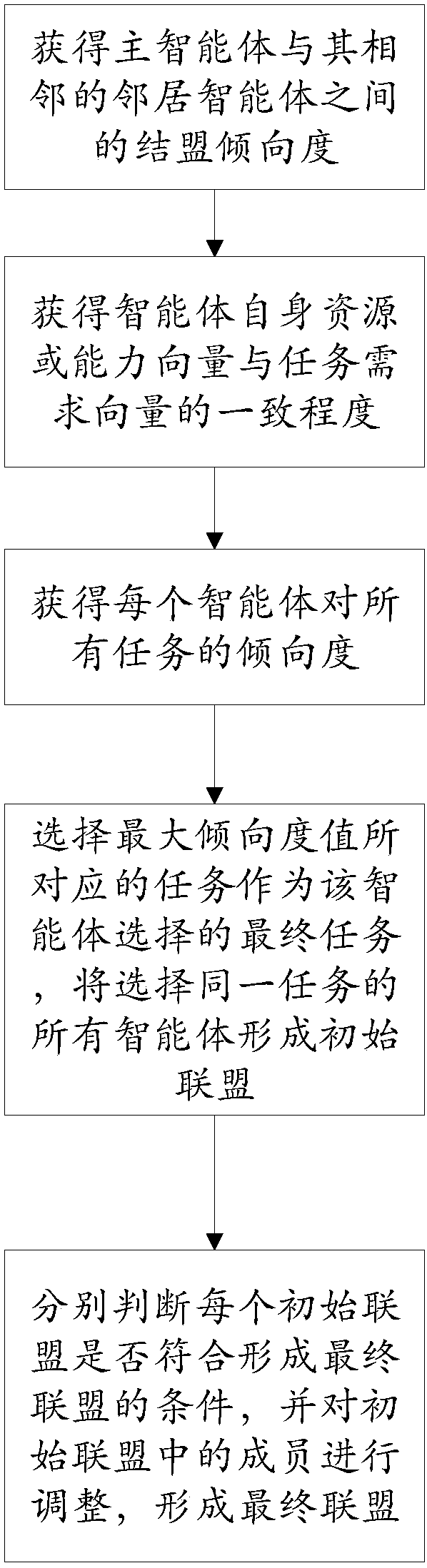
[0031] According to the characteristics of the balanced alliance, that is, the larger the alliance balance coefficient, the higher the alliance's fault tolerance rate, the agent's task selection behavior model is established, and according to figure 1 The five states of the agent shown are to recruit and delete alliance members, form the final alliance, and perform corresponding tasks. As shown in 2, specifically include:
[0032] Step 1. Obtain the alliance tendency between the main agent and its adjacent neighbor agents:
[0033] In the literature (Vig L, Adams J A. Multi-robot coalition formation [J]. Robotics, IEEE Transactions on, 2006, 22(4):637-649.), the concept of a balanced alliance is prop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More