

A universal module with adjustable stiffness, mechanical arm and working method
A general-purpose module and robotic arm technology, applied in the field of robotics, can solve the problems of insufficient robot accuracy and difficulty in achieving accuracy, and achieve the effect of simplifying design tasks and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and examples. It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other. For the convenience of description, if the words "up", "down", "left" and "right" appear in the following, it only means that the directions of up, down, left and right are consistent with the drawings themselves, and do not limit the structure.
[0030] A general-purpose module with adjustable stiffness adopts the coexistence of rigidity and flexibility. On the one hand, it ensures a certain degree of flexibility in the structure to avoid harm to people, and on the other hand, it improves the positioning accuracy.
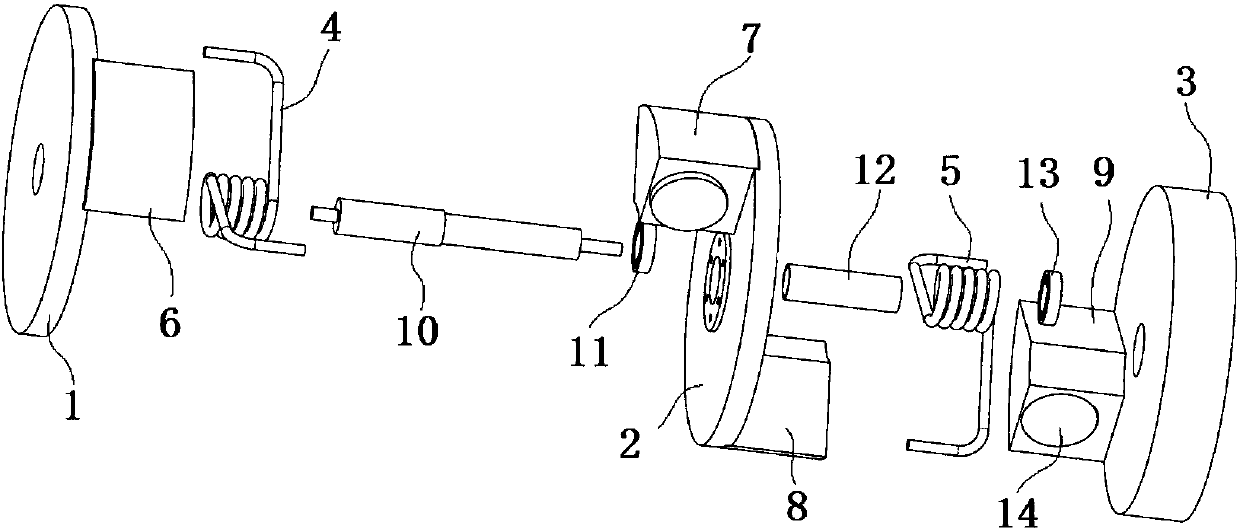
[0031] Such as figure 1 As shown, the universal module with adjustable stiffness includes a first turntable 1, torsion springs 4, 5, turntable connecting shaft 10, rolling bearings 11...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More