Six-degree-of-freedom mechanical arm track planning method with force restriction taken into consideration
A trajectory planning, robotic arm technology, applied in manipulators, program-controlled manipulators, instruments, etc., can solve problems such as Cartesian path loss sampling points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below with reference to the accompanying drawings.
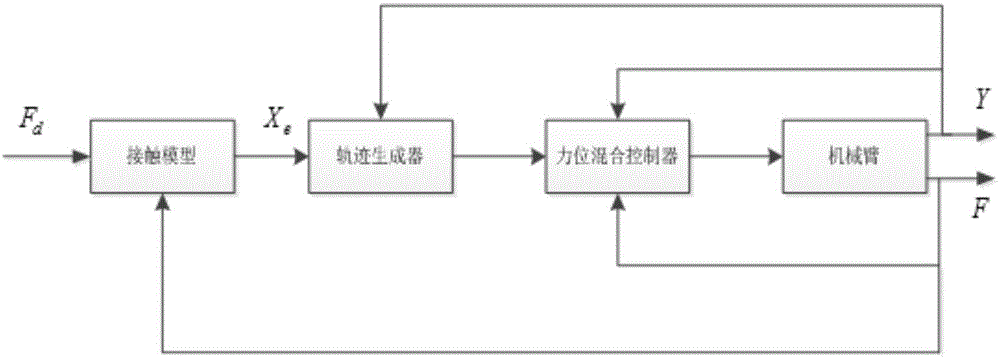
[0059] The invention provides a trajectory planning method for a six-degree-of-freedom manipulator arm considering force constraints, which belongs to the field of manipulator arm trajectory planning. In the trajectory planning of the traditional 6-DOF manipulator, only the position of the end of the manipulator is considered, and there are few studies on the trajectory planning of force constraints, but such problems are particularly important. In view of this situation, the present invention proposes a type of 6-DOF manipulator. Trajectory planning methods considering force constraints. The trajectory method of the mechanical arm considering force constraints proposed by the present invention is as follows: first, the force constraints are converted into contact deformation and contact motion speed constraints by using the contact model and contact kinematics, and then...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap