Intelligent networking car coordinated lane-changing control method
A control method and technology of an intelligent network, which are applied to control devices, vehicle components, input parameters of external conditions, etc., can solve problems such as inability to obtain dynamic traffic environment information in real time, difficult judgment basis for lane-changing control systems, and single data information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] 1. Lane-changing control process for intelligent connected vehicles
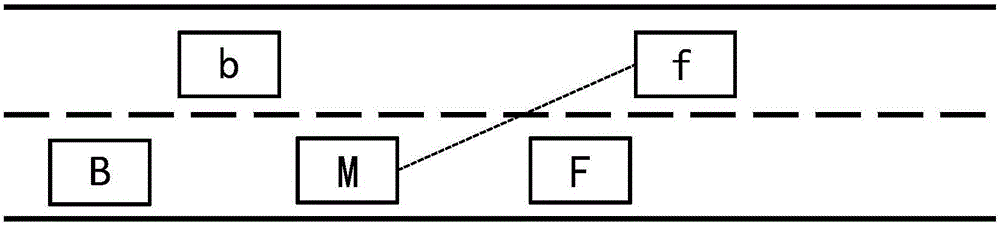
[0066] Such as figure 1 As shown in , the vehicle is traveling at a constant speed from west to east; the solid line is along the road, and the dotted line is the lane line for changing lanes. f means the vehicle in front, and the vehicles driving in the right lane respectively use the capital letter B to indicate the vehicle behind, F to indicate the vehicle in front, and M vehicles to change lanes;
[0067] The basic situation of vehicle lane change is as follows: figure 1 shown, where V M , V F Refers to the speed of M car and F car, L Mb , L Mf , L MF Refers to the actual longitudinal distance between M car and b car, f car, F car, S Mb , S Mf , S MF Refers to the theoretical minimum safe distance between car M and car b, car f, and car F.
[0068] The vehicle lane change control process is mainly divided into the following steps:
[0069] Step 1: The driver of car M generates a lane-ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More