

Vibrating drum with adjustable vibrating compacting force
An adjustable, vibrating wheel technology, applied in roads, road repairs, roads, etc., can solve problems such as inability to adapt, unfavorable compaction quality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
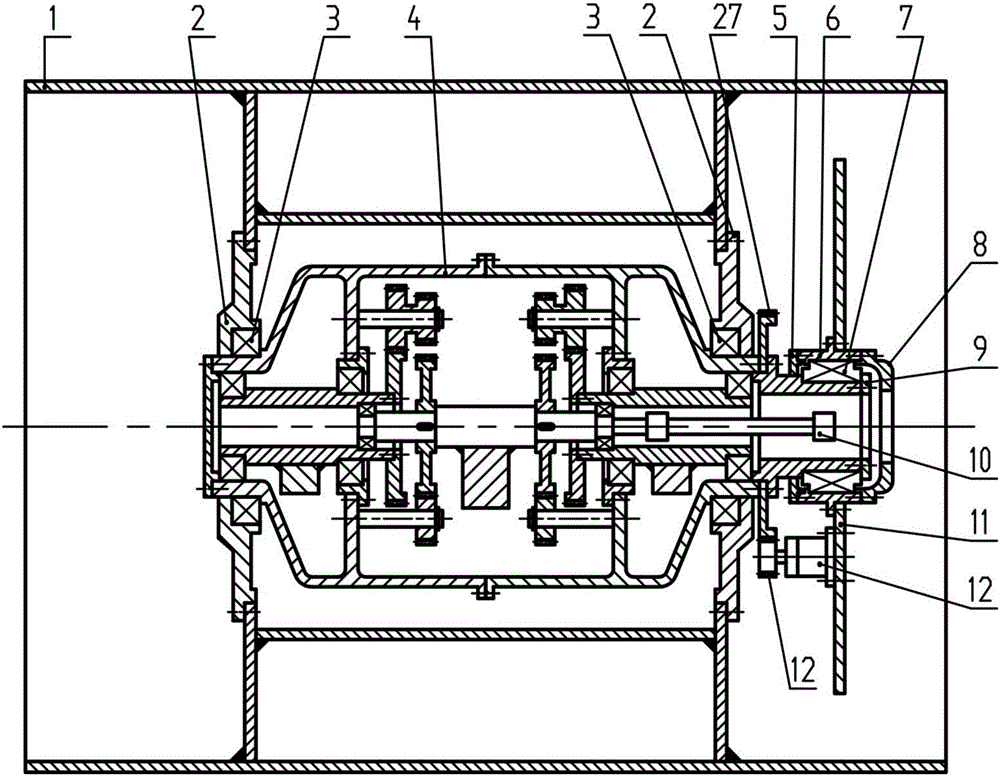
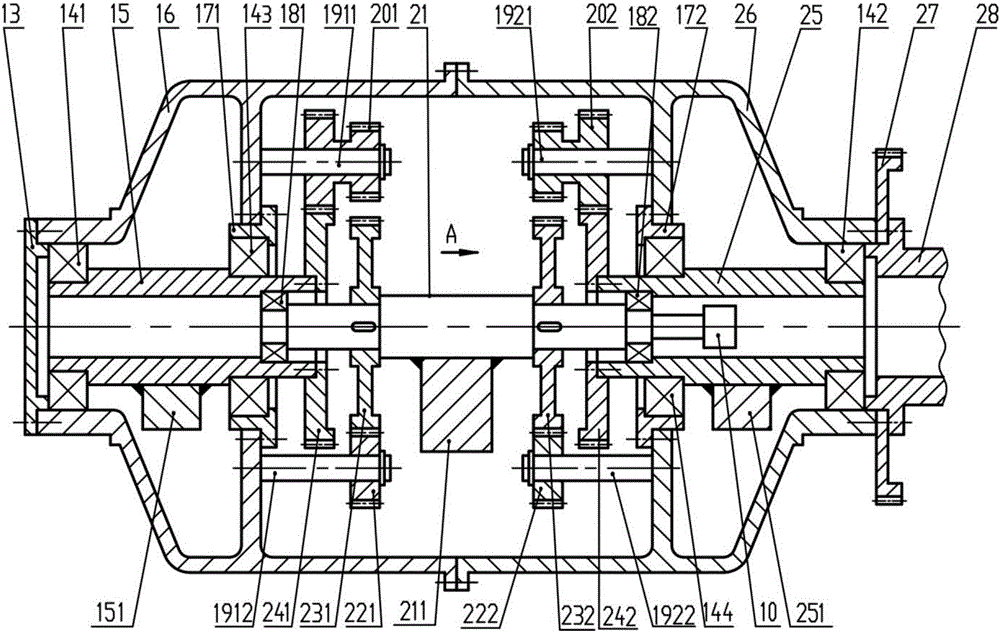
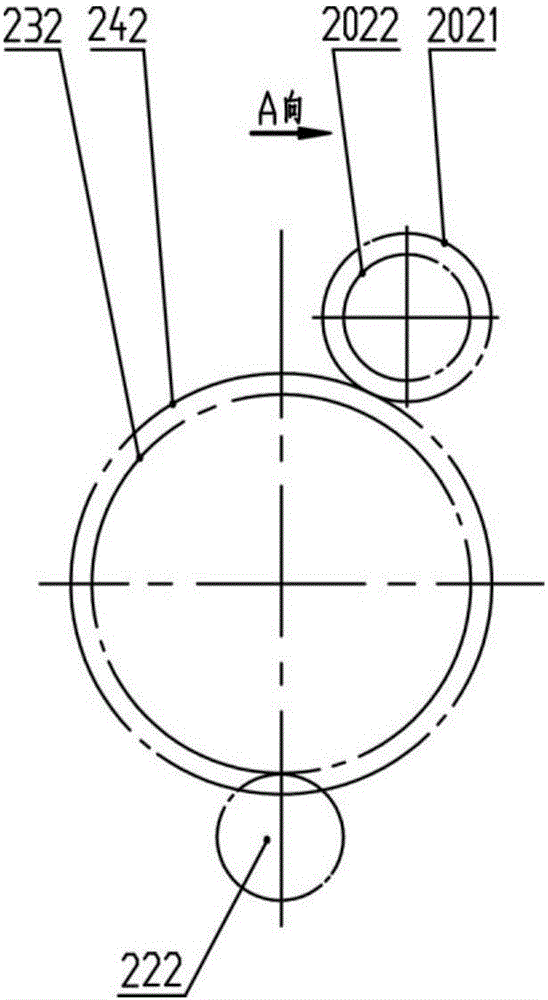
[0020] In specific embodiments of the present invention, see Figure 1 to Figure 6 , a vibrating wheel with adjustable vibration compaction force, including a wheel body 1 and a vibration chamber 4, the vibration chamber 4 is installed in the wheel body 1 through a large bearing seat 2 and a supporting bearing 3, and the vibration chamber 4 includes a symmetrically arranged left vibration chamber 16 and right vibrating chamber 26; Left vibrating chamber 16 and righ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More