Static walk gait and diagonal trot gait switching algorithm applied to quadruped bionic robot
A static gait and diagonal technology, applied in the field of artificial intelligence, can solve problems such as the stability and smoothness of gait switching, the switching execution process is not given, and the switching time of robots is not relatively perfect. Smoothness, the effect of shortening the time difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
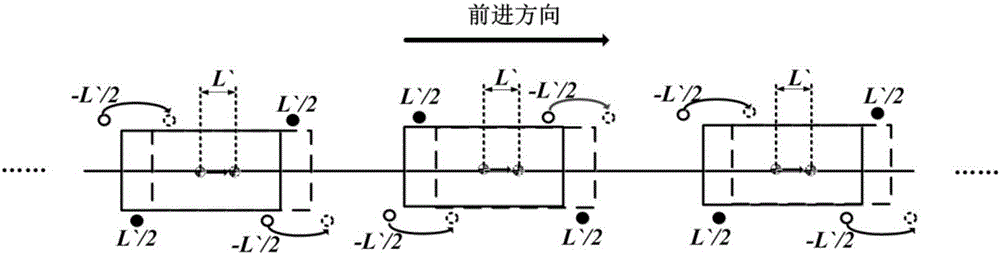
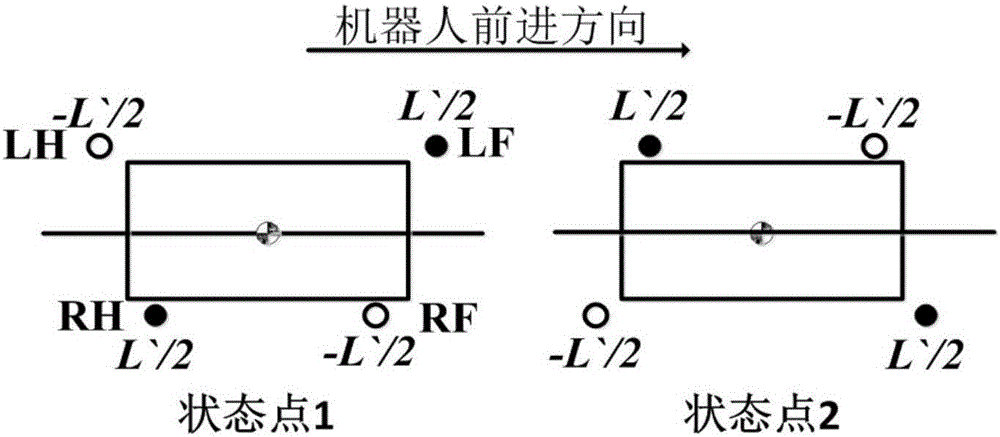
[0066] The static gait and diagonal trotting gait switching algorithm applied to the quadruped bionic robot of the present invention first needs to define the x value of the foot end position during the switching process. In the present invention, a method for defining the x value of the foot end position in the switching process is given. In the switching process, due to the simultaneous movement of the foot and the advancement of the body, the initial position of the foot end swing and the landing point The position is the relative position of the foot end to its own coordinate system. In order to indicate the position of the foot end swing starting point and the foot point in the x direction of the body coordinate system, the relative position hip_x of the foot end and its own hip joint is defined. The principle of expression is based on the own hip joint The joint is the origin. If the foothold is in front of the origin, the position is positive, and if it is behind, the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More