

Wall-climbing trolley for spraying paint/glue
A car and wall-climbing technology, which is applied in the field of wall-climbing robots, can solve the problems that wall-climbing robots cannot adapt to the wall environment and tasks, and achieve the effect of light weight, easy implementation, low noise and no noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
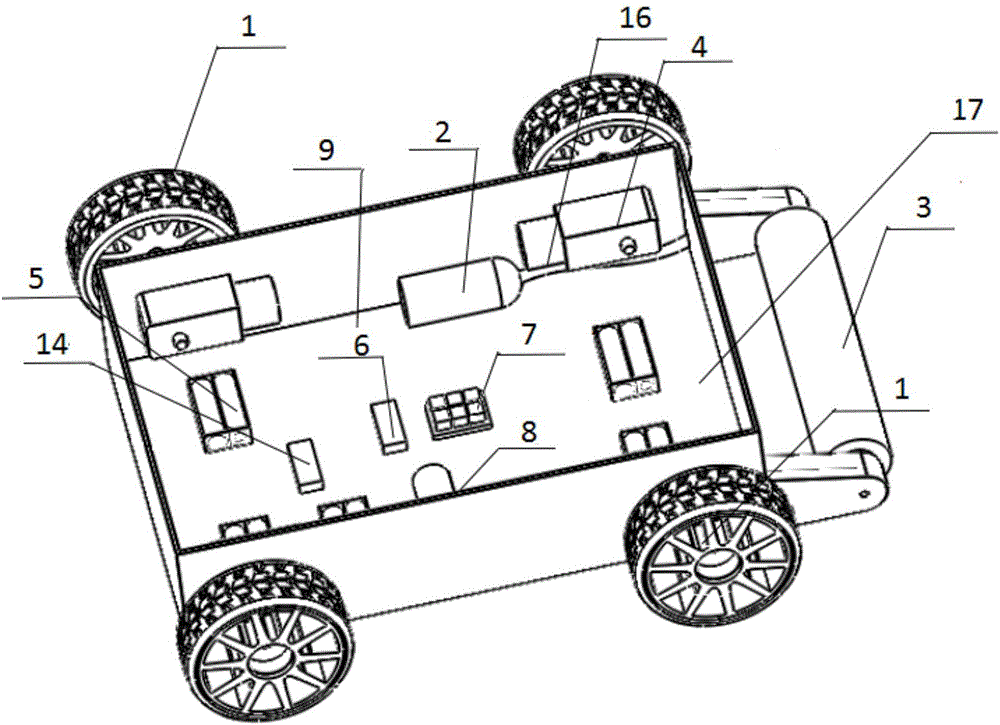
[0016] The present invention aims at the deficiencies of existing wall-climbing robots, and proposes a wall-climbing trolley for spraying paint / glue, such as figure 1 As shown, it includes a body 9, a traveling device, a control system, a painting / gluing device and a magnetic chassis 17.
[0017] The paint spraying / gluing device is arranged at the front end of the body 9. During the walking process of the robot, it mainly undertakes the task of creating an adsorption environment. It sprays magnetic materials onto the wall, and the material is adsorbed to the wall. Finally, a magnetic path is formed, and the magnetic path is laid in advance in the direction of the wall climbing car to create a magnetic adsorption environment. Above-mentioned magnetic chassis 17 is a base plate with magnetism, and its height is very low and is installed on the bottom of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More