

Road marking automatic detection and classification method based on mobile laser scanning point cloud
A road marking and laser scanning technology, applied in character and pattern recognition, instruments, computer parts, etc., to improve quality, accurately detect and classify, and avoid training sample collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
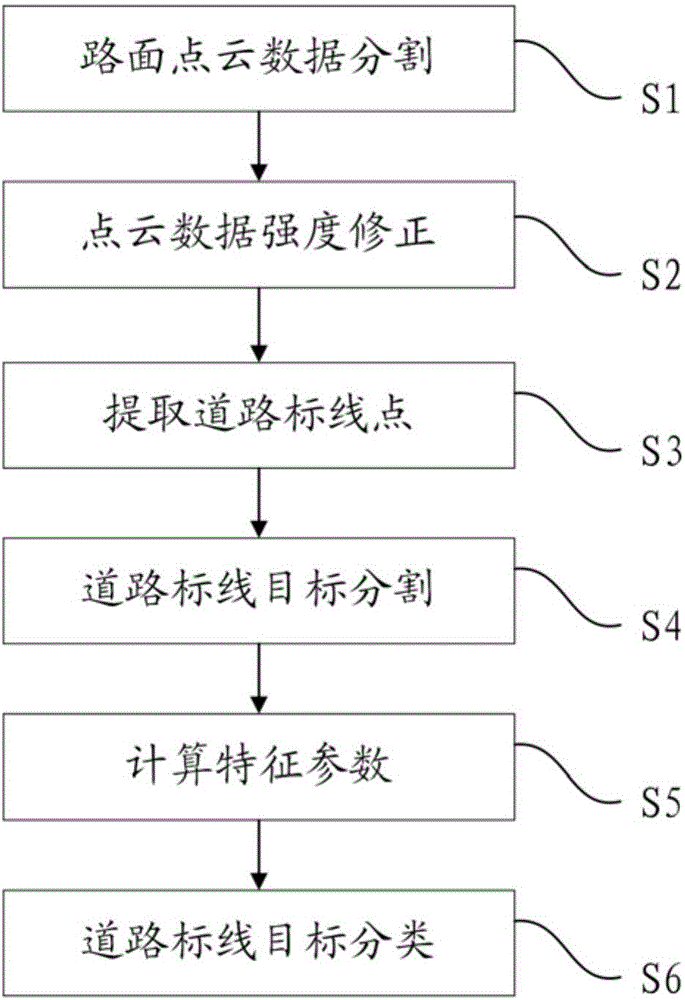
[0059] see figure 1 , the invention discloses a method for automatic detection and classification of road markings based on mobile laser scanning point clouds, which includes the following steps:
[0060] S1. Road surface point cloud data segmentation
[0061] Road markings only exist on the road, while the original point cloud contains a large number of non-road points. In order to reduce the amount of data for subsequent processing, the road surface point cloud is firstly segmented. This step is specifically implemented through the following steps:
[0062] S11. Divide the original point cloud data into voxels with a side length of 5 cm, and then perform upward region growth until the upper boundary of the point cloud, thereby clustering the original point cloud into several tree structures. The so-called upward region growth means that during the growth process, each voxel can only grow to the nine adjacent voxels above it.
[0063] S12, judge each tree structure respec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More