

Motion path planning method of pilotless automobile when encountering obstacle and system thereof
An unmanned vehicle, motion path technology, applied in the control/adjustment system, vehicle position/route/height control, motor vehicle and other directions, can solve the occupant's discomfort, not very perfect, easy to be rear-ended by the rear car, etc. problems, to achieve the effect of improving safety and comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
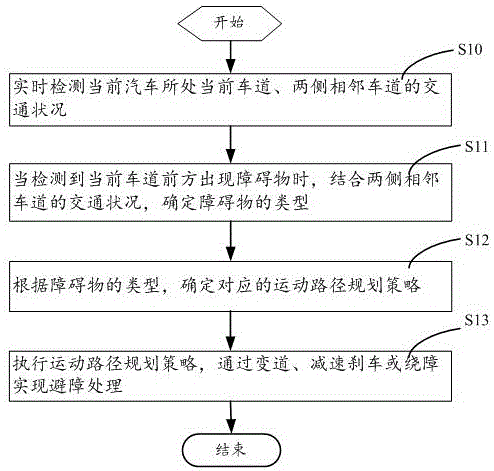
[0078] Such as figure 1 As shown, it is a schematic diagram of the main flow of an embodiment of a motion path planning method for an unmanned vehicle when encountering an obstacle provided by the present invention. combined Figure 2 to Figure 3 Shown, in this embodiment, this method comprises the steps:
[0079] Step S10, real-time detection of the traffic conditions of the current lane where the current car is located and the adjacent lanes on both sides; spec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More