

Redundant manipulator acceleration layer noise-tolerant control method
A control method, the technology of the robotic arm, applied in the direction of manipulator, program control, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the drawings.
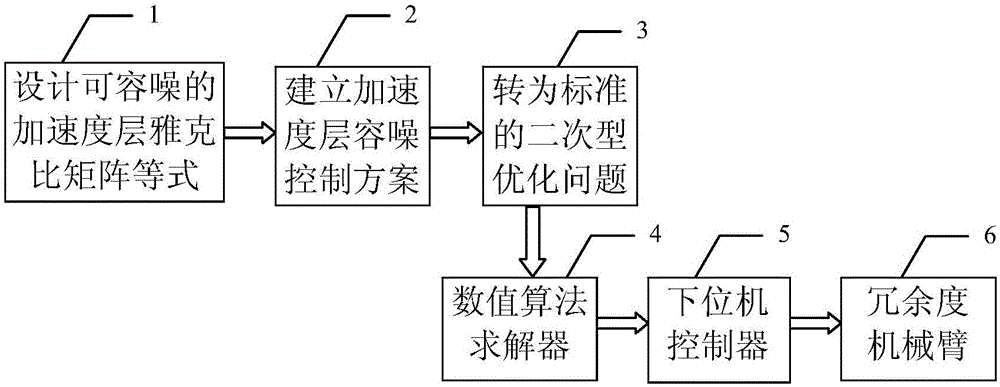
[0024] Such as figure 1 The shown noise tolerance control method of the acceleration layer of a redundant manipulator mainly consists of designing a noise-tolerant acceleration layer Jacobian matrix equation 1. Establishing the acceleration layer noise tolerance control scheme 2. Converting to a standard quadratic optimization problem 3. Numerical algorithm solver 4, lower computer controller 5, redundant manipulator 6 are composed of six parts.
[0025] First, according to the Jacobian matrix equation of the acceleration layer of the manipulator, by introducing position error and speed error feedback, a new type of noise-tolerant Jacobian matrix equation is designed; then combined with the performance indicators that need to be optimized, the acceleration layer noise-tolerant control scheme is established. And transform it into a standard quadratic optimization problem, so as to const...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More