

Path planning system and method for overtaking vehicle on adjacent lane in single-lane automatic drive mode
An adjacent lane, autonomous driving technology, applied in the traffic control system of road vehicles, vehicle components, collision avoidance systems, etc., can solve the problems of reduced comfort of the automatic driving function, traffic accidents, driver danger, etc., to avoid panic The effect of reducing the sense of danger, avoiding car accidents, and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing.
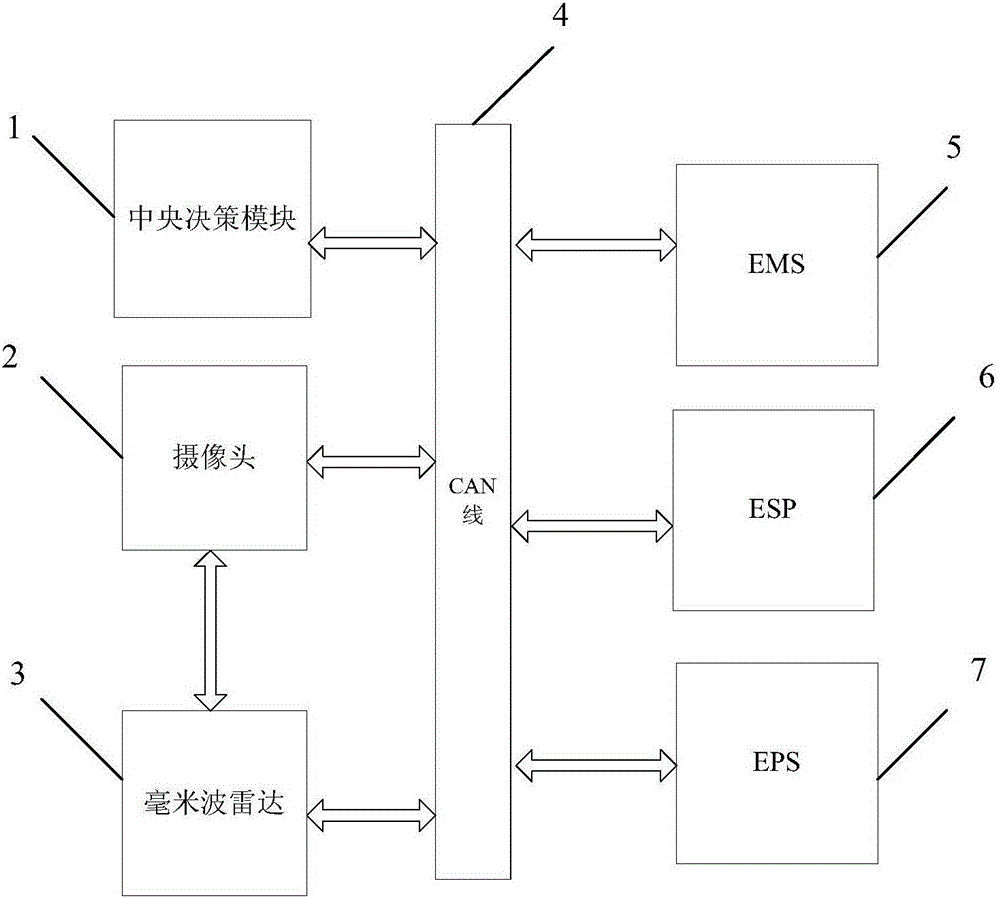
[0032] Such as figure 1 The shown path planning system for single-lane autonomous driving overtaking vehicles in adjacent lanes includes a camera 2, a millimeter-wave radar 3, a central decision-making module 1, and an executive agency.
[0033] The millimeter-wave radar group includes five millimeter-wave radars 3 installed directly in front of the vehicle, left front, right front, left rear and right rear; and rear) whether there is a vehicle, the number of millimeter wave radar 3 can be adjusted according to the actual situation.
[0034] The camera 2 is installed in the middle of the front side of the vehicle; it is used to obtain the lane line information of the vehicle, and when the millimeter-wave radar group detects that there is a vehicle in the adjacent lane in front of the vehicle, it is compared with the information detected by the millimeter-wave radar group. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More