Ground-air joint collaborative search and rescue method based on robot swarm
A robot swarm and robot technology, applied to instruments, motor vehicles, two-dimensional position/channel control, etc., can solve problems such as low efficiency, achieve the effects of reducing power consumption, improving search value, and improving search and rescue efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
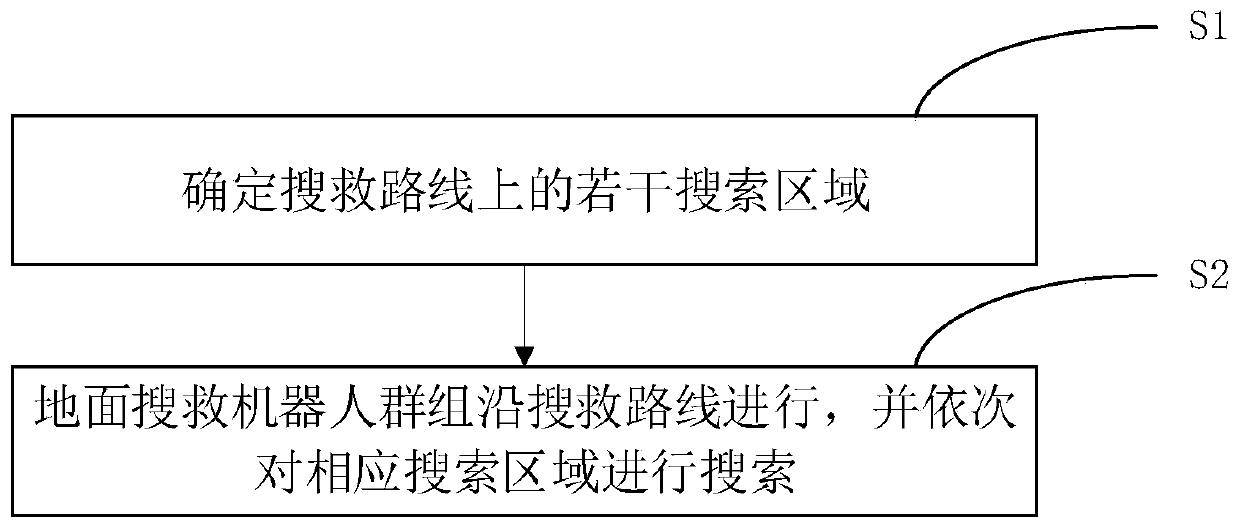
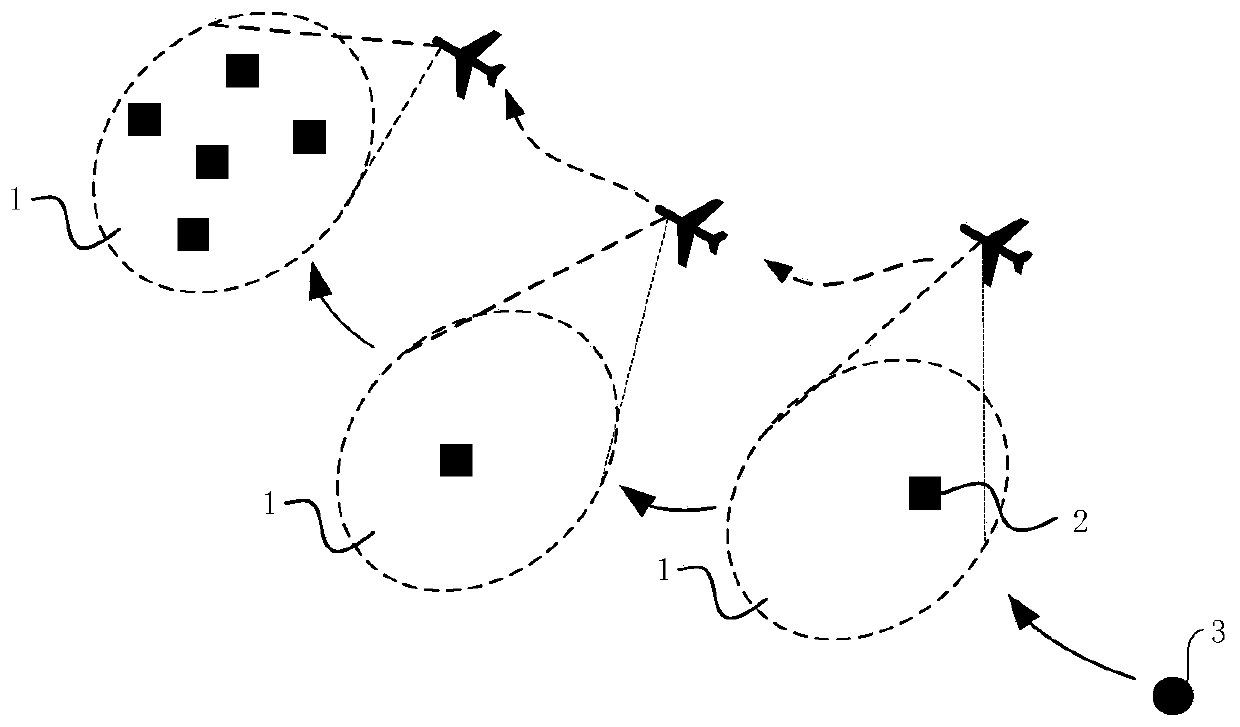
[0022] Such as Figure 1 to Figure 3 As shown, a ground-air joint collaborative search and rescue method based on a robot group provided by the present invention includes: a drone, a robot group composed of several search and rescue robots, and an electric energy supply robot for providing electric energy. The drone, search and rescue robot, and power supply robot, for example but not limited to, use WiFi, 4G to communicate wirelessly with the server, or use any known wireless communication method in the prior art.
[0023] Optionally, among the search and rescue robots, a robot is set as the leader robot, and other search and rescue robots follow the leader ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More