

Method for simultaneous performing visual servo and adaptive depth identification through robot
A mobile robot and visual servo technology, applied in two-dimensional position/channel control, etc., can solve the problems of increasing system complexity and cost, and achieve the goal of increasing system complexity and cost, good perception, and solving the problem of global stability of the system Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0071] First, define the system coordinate system
[0072] Section 1.1, System Coordinate System Description
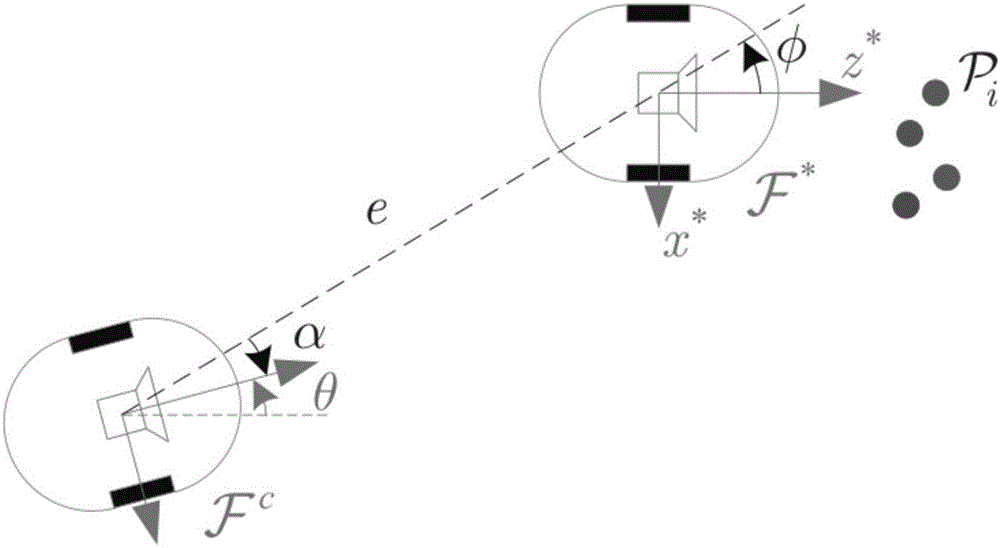
[0073] Define the coordinate system of the on-board camera to be consistent with the coordinate system of the mobile robot. by Represents the Cartesian coordinate system of the expected pose of the robot / camera, where The origin of is at the center of the wheel axis, which is also the optical center of the camera. z * The axis coincides with the optical axis of the camera lens, and also coincides with the forward direction of the robot; x * The axis is parallel to the axis of the robot; y * axis perpendicular to x * z * plane (mobile robot motion plane). by Indicates the current pose coordinate system of the camera / robot.
[0074] Let e(t) represent the distance between the desired position and the current position; θ(t) represents compared to The rotation angle of the robot; α(t) represents the current pose of the robot and the arrive The angle b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More