

Method for unmanned aerial vehicle planar automatic obstacle avoiding in dynamic uncertain environments
An unmanned aerial vehicle, uncertainty technology, applied in the direction of instruments, aircraft traffic control, non-electric variable control, etc., can solve the problems of reduced reliability of obstacle avoidance, less consideration of sensor influence, hidden safety hazards, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
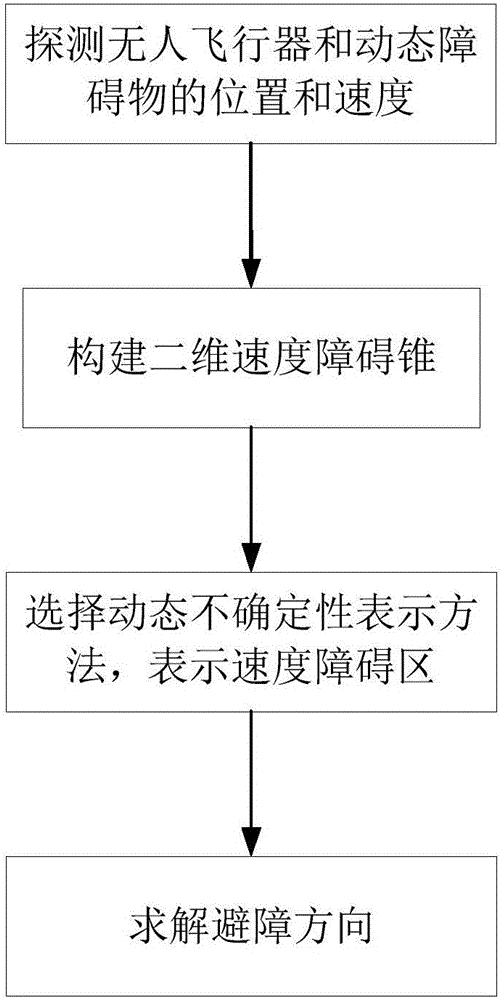
Method used
Image

Examples
Embodiment 1
[0112] In a dynamic uncertain environment, set the unmanned aerial vehicle to take off from the point P s (0,0) to the target point P t Execute the task at (500,1000). During the flight of the UAV, the threat obstacles in the surrounding environment are detected by the sensor device carried by itself. The following is based on the autonomous obstacle avoidance algorithm of the UAV in a dynamic and uncertain environment to simulate the collision avoidance of the UAV. Consider uncertainty in dynamic environments. The initialization conditions of UAV and obstacles are shown in Table 1. Among them, only one of the obstacles detected by the UAV has a level-1 threat, and the others are all level-3 threat obstacles.
[0113] Table 1 Initialization conditions for single threat obstacle collision avoidance
[0114]
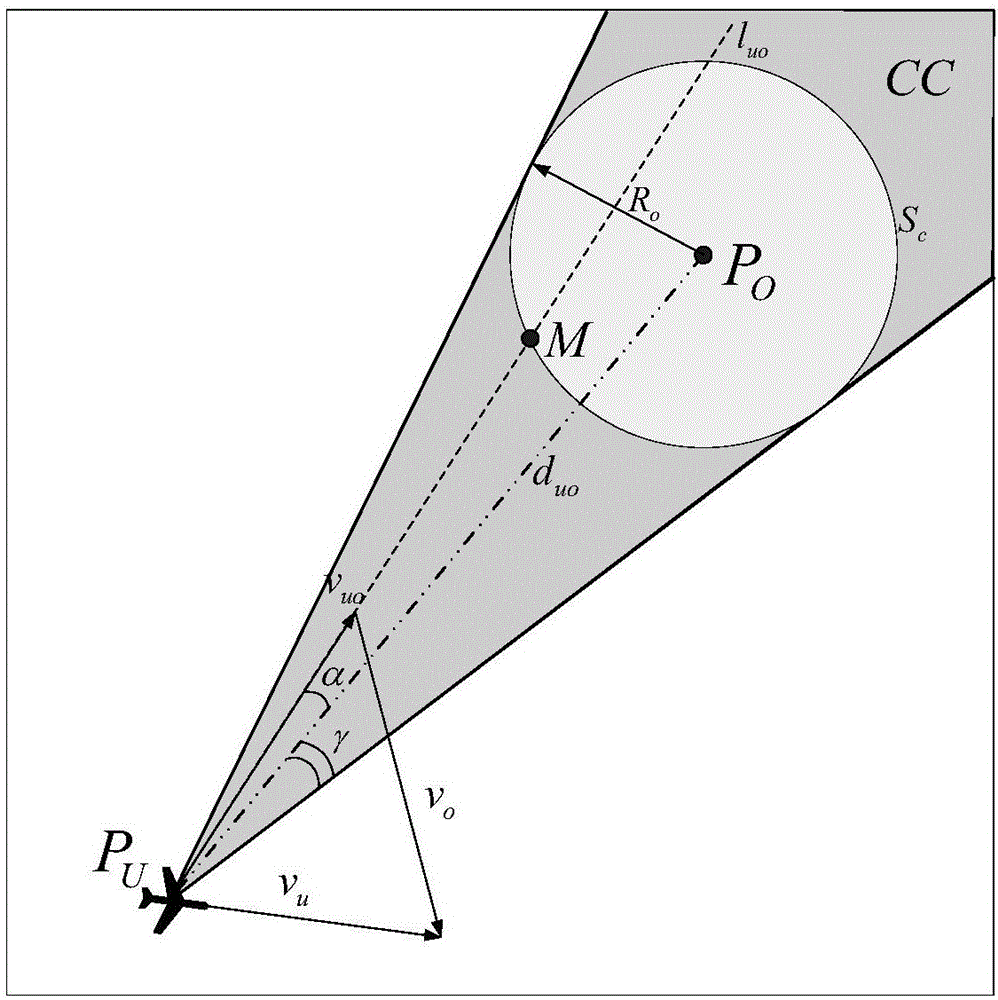
[0115] According to the calculation method of the obstacle arc size, the threat obstacle arc parameters under different dynamic uncertainties in Table 2 can be obta...
Embodiment 2
[0120] When the UAV detects multi-threat obstacles at the same time, the corresponding initialization conditions are shown in Table 3. From Table 3, it can be concluded that the obstacle O 1 , O 2 has a level one threat; and O 3 , O 4 It is a level 3 threat obstacle.
[0121] Table 3 Initialization conditions for multi-threat obstacle collision avoidance
[0122]
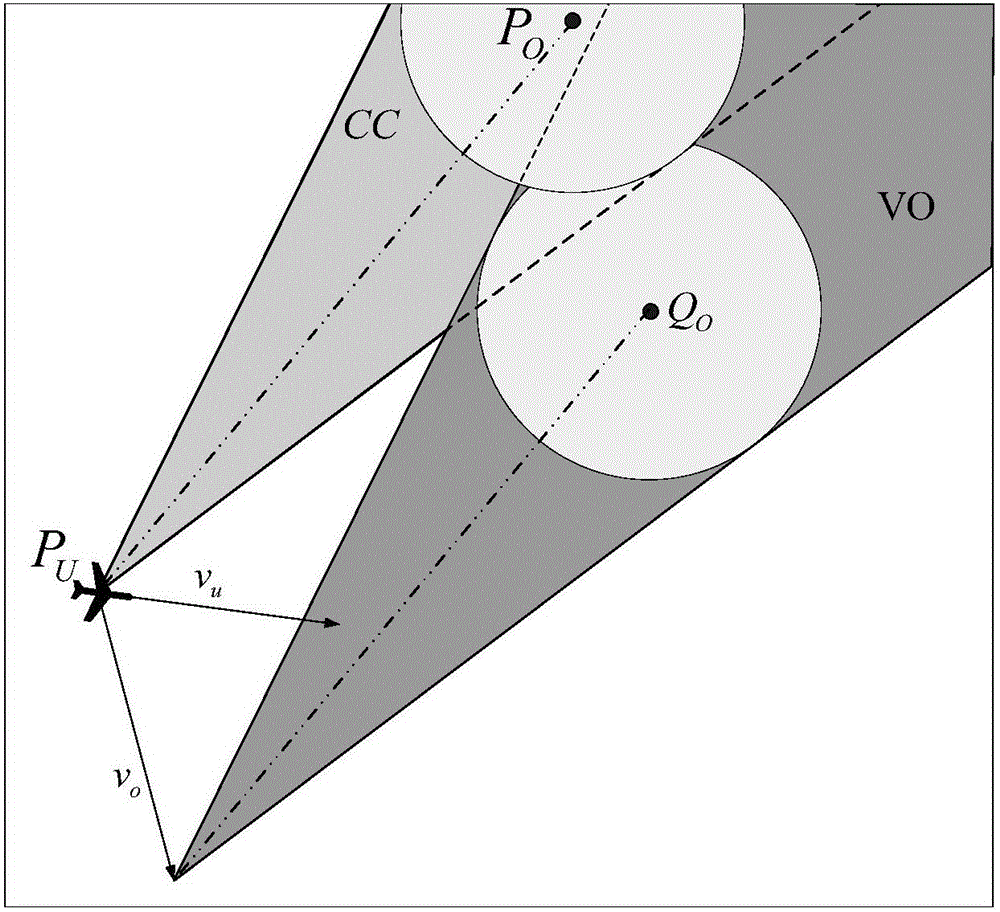
[0123] Table 4 gives the arc parameters of the two threat obstacles under different dynamic uncertainties, and the entire obstacle arc range is the union of the two threat obstacle arc ranges, and becomes larger with the increase of the dynamic uncertainty .
[0124] Table 4 Threat obstacle arc parameters under different dynamic uncertainties
[0125]
[0126] Similarly, the UAV’s collision avoidance direction angle for multi-threat obstacles can be determined as a value outside the entire obstacle arc range, and then according to the corresponding initialization conditions, the obstacle avoidance time t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More