

Vehicle omni-directional following method based on UWB and laser radar sensor
A laser radar and sensor technology, applied in the field of electronic information, can solve problems such as difficult to support intensive work instructions, the obstacle avoidance function has not been perfectly reflected, and data processing has not reached high-efficiency data processing, so as to reduce the difficulty of calculation and improve Calculation efficiency and high accuracy of mapping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
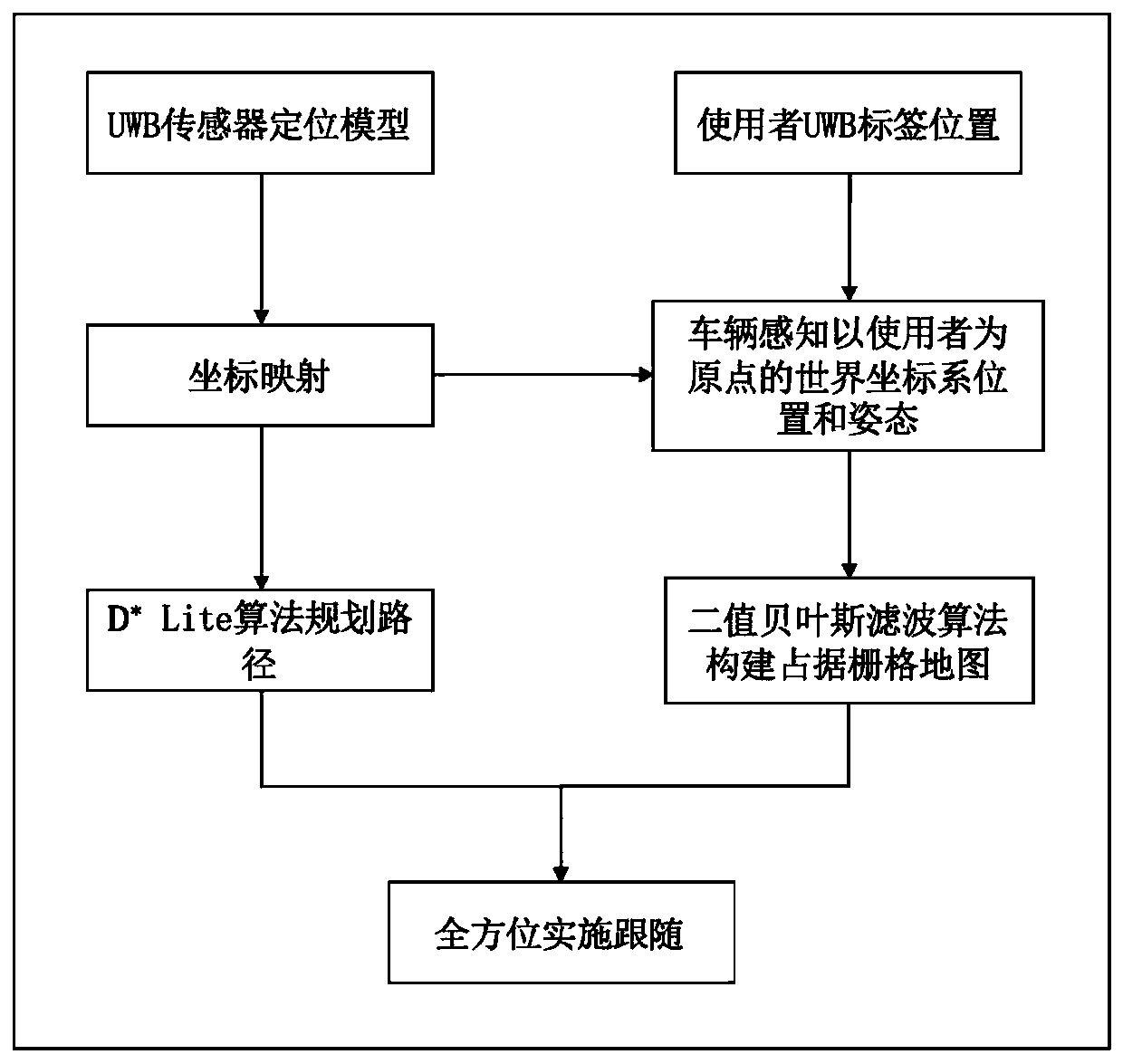
[0057] combine figure 1 , the present invention is based on UWB and laser radar sensor vehicle all-round following method, comprises the following steps:
[0058] Step 1. Establish vehicle coordinate system, laser radar coordinate system and UWB sensor coordinate system;
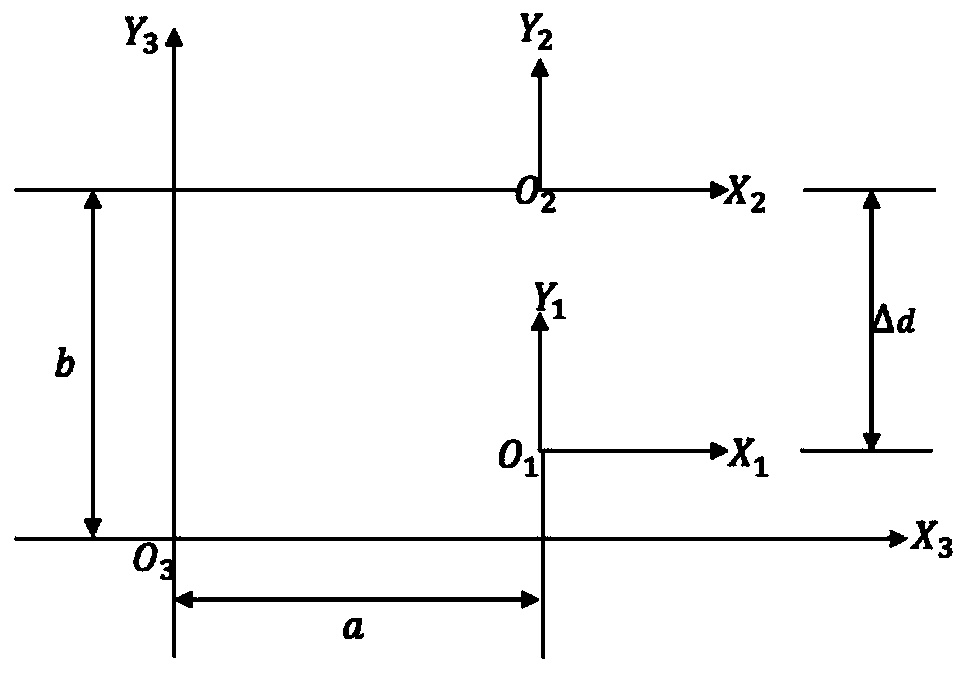
[0059] combine figure 2 , the vehicle’s lidar coordinate system and UWB sensor coordinate system are X 3 o 3 Y 3 , X 2 o 2 Y 2 ;
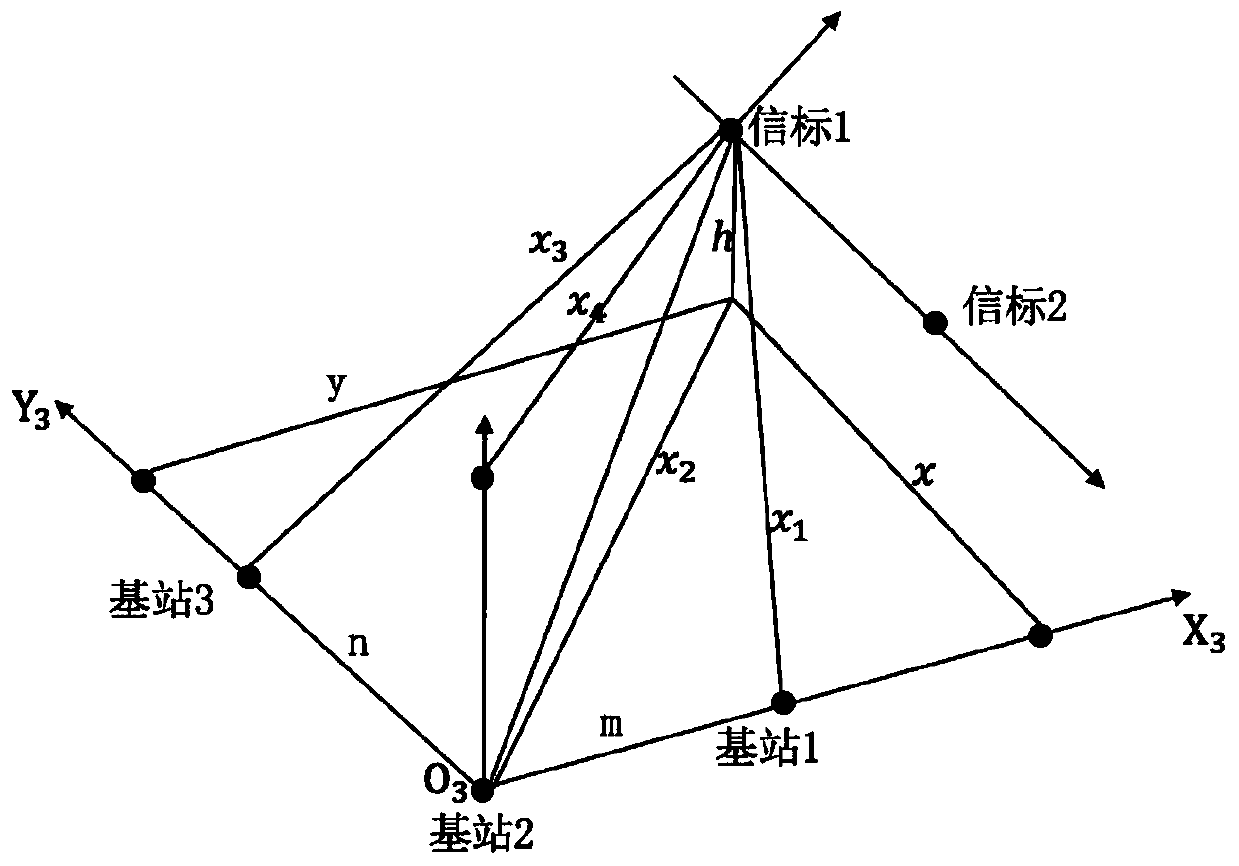
[0060] Base station 1 of the UWB sensor system is located at the right rear of the vehicle platform; base station 2 is located at the left rear of the vehicle platform, and is symmetrical to base station 1 about the central axis of the vehicle, and the distance between base station 1 and base station 2 is m; base station 3 is located at the vehicle platform The left front part of , is symmetrical with base station 1 about the center of the vehicle, and the distance between base station 3 and base station 2 is n; UWB sensor system coordinate system X 3 o 3 Y 3 That is,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More