

Virtual reality rehabilitation training method and system based on surface myoelectricity and depth image
A virtual reality and rehabilitation training technology, applied in the field of rehabilitation engineering, can solve the problems of inconspicuous hand features, limit the application and effect of rehabilitation training, and cannot accurately identify the intention of hand movements of residual limbs, so as to enhance interactivity and fun. , Improve rehabilitation effect and efficiency, reduce training burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution, design method and advantages of the present invention clearer, the present invention will be further described in detail through specific embodiments in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0039] In all examples shown and discussed herein, any specific values should be construed as exemplary only, and not as limitations. Therefore, other instances of the exemplary embodiment may have different values.
[0040]Techniques, methods and devices known to those of ordinary skill in the relevant art may not be discussed in detail, but where appropriate, such techniques, methods and devices should be considered part of the description.
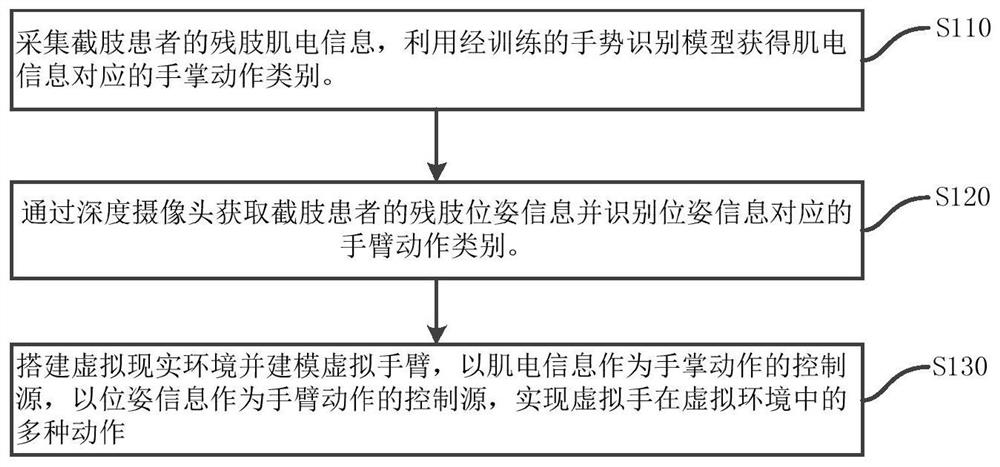
[0041] According to an embodiment of the present invention, a rehabilitation training method based on surface electromyographic inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More