

Pedestrian tracking method and device, computer equipment and storage medium
A pedestrian and robot technology, applied in the field of computer vision, can solve the problem that indoor robots do not have real-time active follow-up, and achieve the effect of improving the level of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
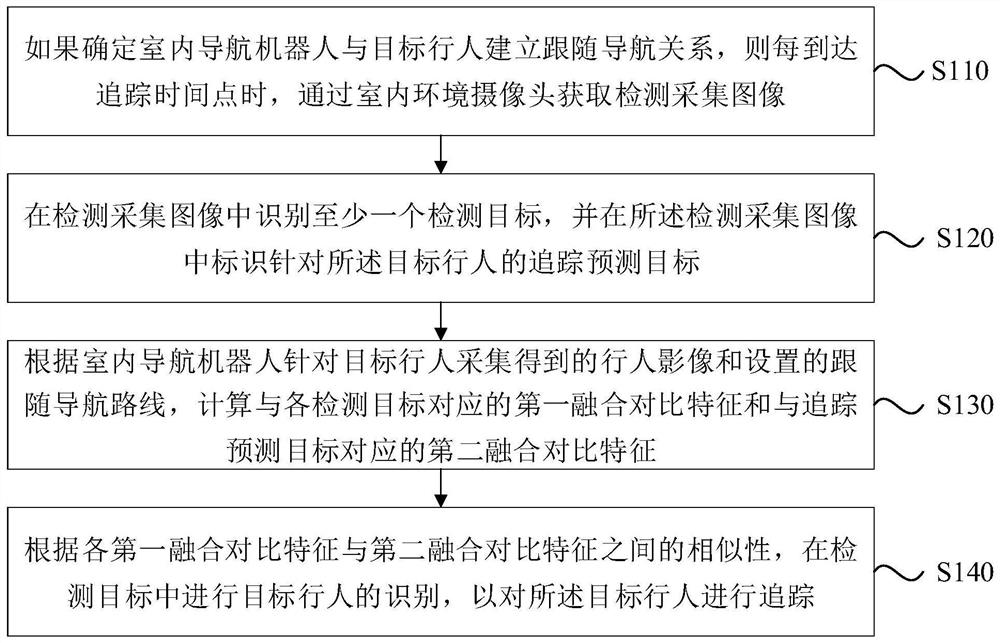
[0026] figure 1 It is a flowchart of a pedestrian tracking method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation that the indoor navigation robot actively follows in real time. The method of this embodiment can be executed by a pedestrian tracking device, which can be implemented by means of software and / or hardware, and which can be configured in a server.
[0027] Correspondingly, the method specifically includes the following steps:
[0028] S110. If it is determined that the indoor navigation robot has established a follow-up navigation relationship with the target pedestrian, acquire a detection and collection image through the indoor environment camera every time the tracking time point is reached.
[0029] Among them, the following navigation relationship can be that the indoor navigation robot collects the initial image of the target pedestrian, and establishes a task relationship with the target pedestrian, so as to...
Embodiment 2
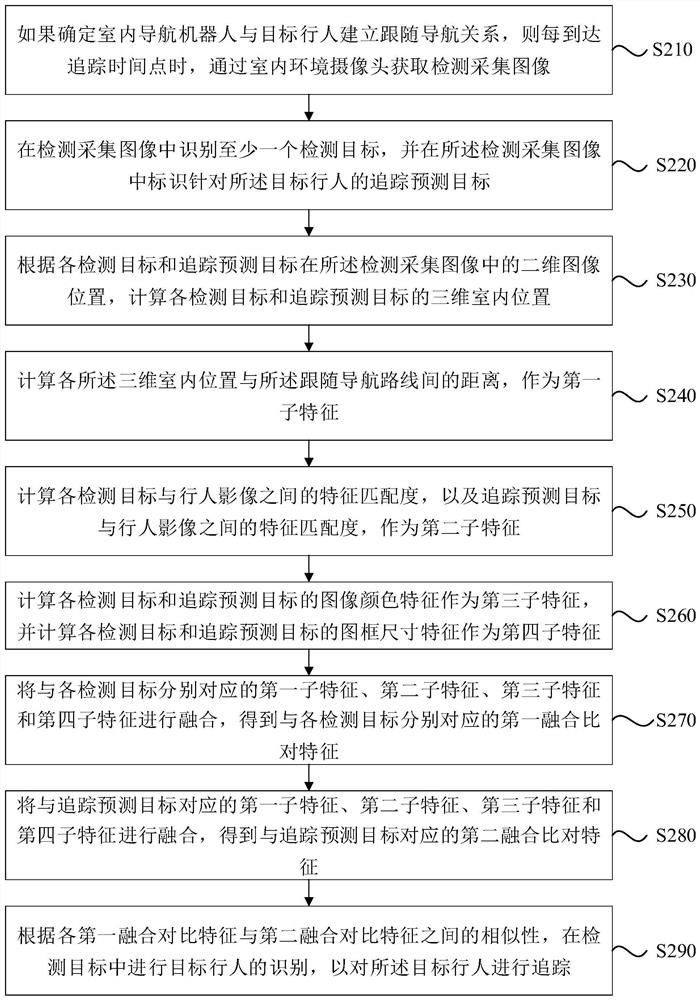
[0056] Figure 2a It is a flow chart of another indoor robot navigation control method provided by Embodiment 2 of the present invention. This embodiment is refined on the basis of the above-mentioned embodiments, and calculates the first fusion and comparison features corresponding to each detection target and the first fusion comparison feature and Track the second fusion and comparison features corresponding to the predicted target for further refinement, refer to Figure 2a , the method specifically includes the following steps:
[0057] S210. If it is determined that the indoor navigation robot has established a following navigation relationship with the target pedestrian, acquire a detection and collection image through the indoor environment camera every time the tracking time point is reached.
[0058] S220. Identify at least one detection target in the detection and collection image, and identify a tracking prediction target for the target pedestrian in the detectio...
Embodiment 3
[0079] image 3 It is a flow chart of another indoor robot navigation control method provided by Embodiment 3 of the present invention. This embodiment is refined on the basis of the above-mentioned embodiments, and further refines the identification of the target pedestrian in the detection target according to the similarity between the first fusion comparison features and the second fusion comparison features. image 3 , the method specifically includes the following steps:
[0080] S310. If it is determined that the indoor navigation robot has established a follow-up navigation relationship with the target pedestrian, acquire a detection and collection image through the indoor environment camera every time the tracking time point is reached.
[0081] S320. Identify at least one detection target in the detection and collection image, and identify a tracking prediction target for the target pedestrian in the detection and collection image.
[0082] S330. Calculate the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More