

Unmanned ship global path multi-objective planning method based on improved ant colony algorithm
A technology of multi-objective programming and ant colony algorithm, which is applied in the field of global path multi-objective planning of unmanned ships based on the improved ant colony algorithm, can solve the problems of slow convergence speed and high smoothing coefficient of the global path at local extremum, and achieve faster convergence speed , increase the global solution space, and enhance the guiding effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0172] Embodiment 1 is realized by the following steps:
[0173] For a certain type of unmanned surface vehicle, the initialization of the improved ant colony algorithm is as follows:
[0174] The next node probability of ant colony tracing is modified as follows:
[0175]
[0176] The next node of the ant trace:
[0177]
[0178] J is the adjusted heading angle when the USV shipboard laser radar scans and detects that the obstacle is within a safe distance The next node reached.
[0179] Pheromone selection threshold: pheThres = 0.8,
[0180] Pheromone calculation parameters: pheCacuPara=2,
[0181] Pheromone update parameters: pheUpPara=[0.1,0.0003],
[0182] Heuristic information parameters: qfzPara1=ones(10,1)*0.5, qfzPara2=1.1
[0183] Number of ants: m=10,
[0184] Iterative algebra: nc=500,
[0185] Link line point ratio parameter: hi=pathk(l+1,k) / 10,
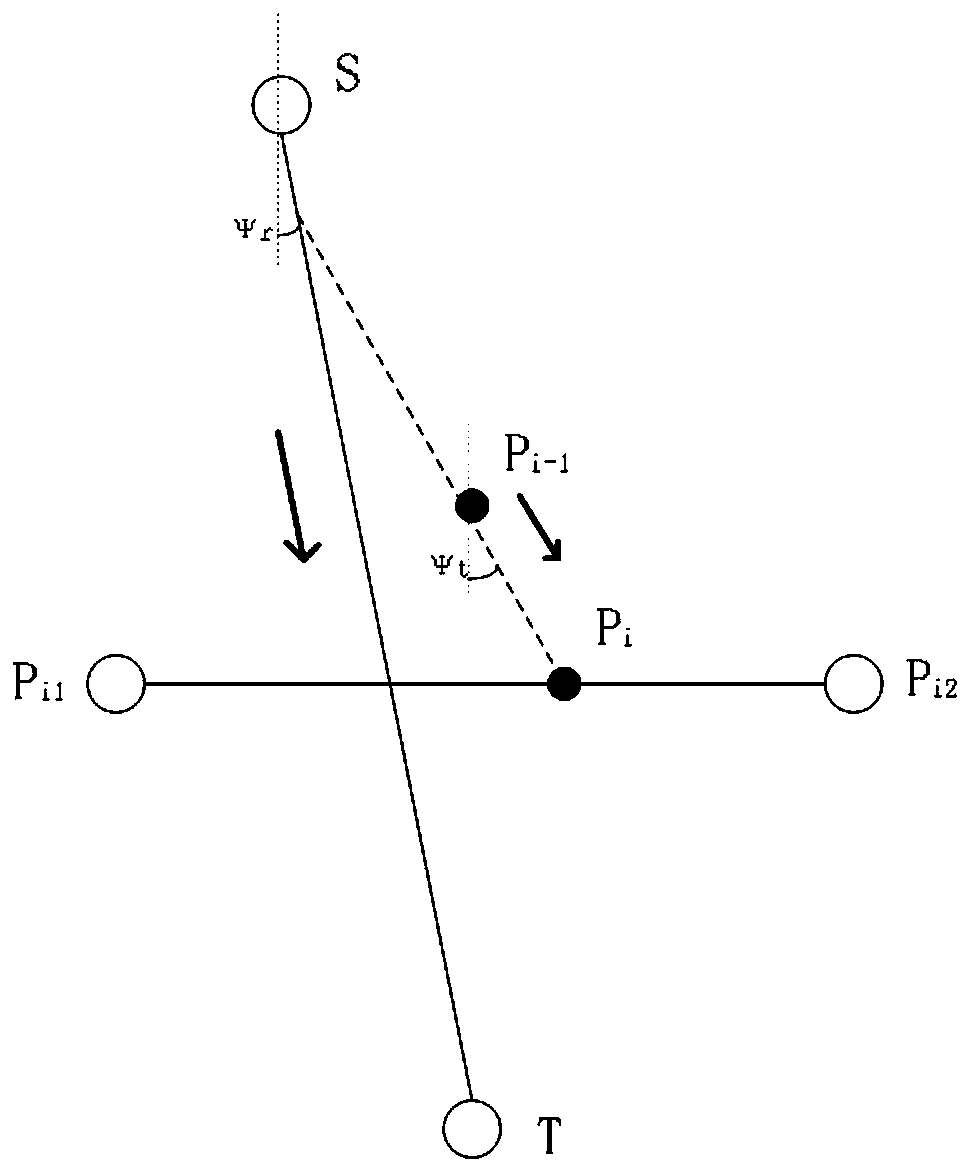
[0186] USV real-time direction angle: ψt=acos(angleend-anglestart),
[0187] USV Expected Direction A...
Embodiment 2
[0223] Embodiment 2 realizes according to the following steps:
[0224] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0225] In the step 6, consider multi-objective tasks such as the shortest global path, the shortest number of algorithm optimization iterations, and the lowest path smoothing coefficient to carry out the simulation experiment of the global path planning of the unmanned vehicle. The global path smoothing coefficient of the UAV is designed as follows:
[0226] The optimal global path smoothness reflects the requirement of the minimum accumulative deflection angle of the heading angle of the unmanned vehicle when navigating at sea, and can improve the safety factor of the global path tracking control of the unmanned vehicle, which is one of the goals of algorithm optimization. When the USV controls the heading change, it needs additional heading angle auxiliary thrusters to work, but the auxiliary heading angle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More