

Three-dimensional obstacle avoidance method for ground surface close-range autonomous exploration unmanned aerial vehicle based on preset route
A UAV and short-distance technology, applied in three-dimensional position/course control, vehicle position/route/altitude control, non-electric variable control, etc., can solve the problems of increased blind spot detection, low autonomy, and obstacle avoidance. Achieve the effect of reducing the blind area of detection, optimizing the trajectory of obstacle avoidance, and improving the efficiency of detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] like figure 1 As shown, the three-dimensional obstacle avoidance method of the rotor UAV based on the preset route in the embodiment of the present invention, the steps of the three-dimensional obstacle avoidance method of the rotor UAV are:
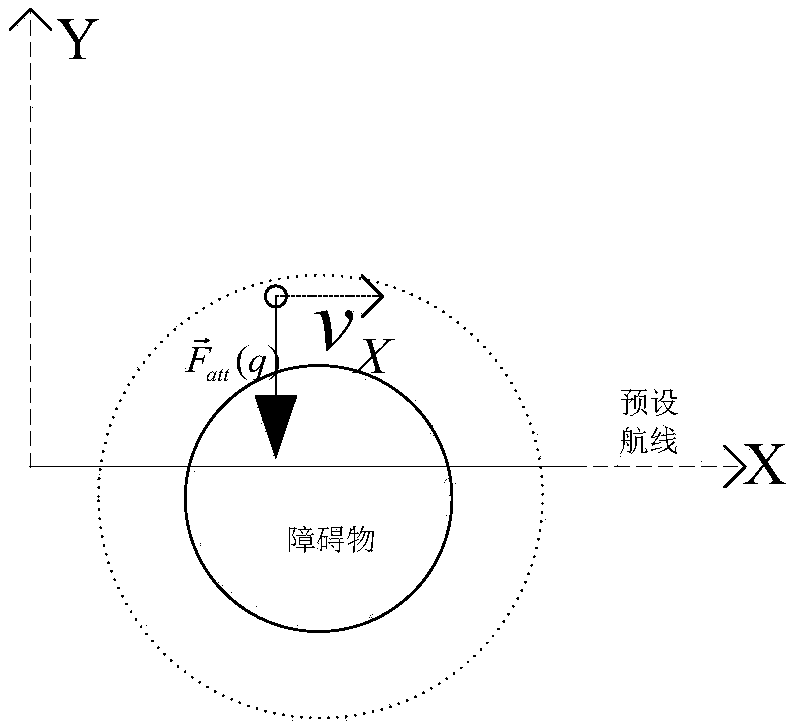
[0050] Step 1. Select an appropriate obstacle avoidance algorithm according to the task requirements: the UAV mission is the short-distance autonomous exploration of the surface, and the preset route is a straight-line route. The real-time requirement for obstacle avoidance is high, and the artificial potential field method is selected;
[0051] Step 2. Establish the UAV obstacle avoidance coordinate system based on the preset route: the task is the short-distance autonomous exploration of the surface, the preset route is a straight route, and the coordinate system is established as the X-axis direction projected from the starting point to the target point on the earth plane , the Y-axis is perpendicular to the X-axis on the earth...
Embodiment 2
[0070] The three-dimensional obstacle avoidance method of the rotor UAV based on the preset route in the embodiment of the present invention, the steps of the three-dimensional obstacle avoidance method of the rotor UAV are:
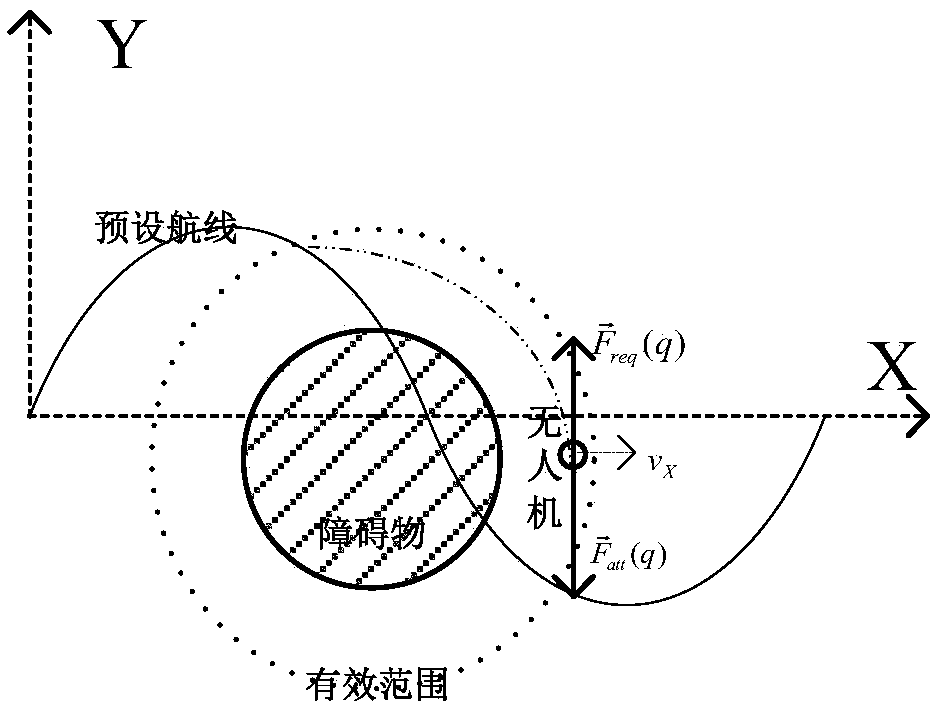
[0071] Step 1. Select the appropriate obstacle avoidance algorithm according to the task requirements: the UAV mission is the short-distance autonomous exploration of the ground surface, the preset route is a curved route, and the real-time requirements for obstacle avoidance are high, so the artificial potential field method is selected;
[0072] Step 2. Establishment of the UAV obstacle avoidance coordinate system based on the preset route: the task is short-distance autonomous exploration of the ground surface, the preset route is a curved route, and the coordinate system is established to project the direction from the starting point to the target point on the earth plane as the X-axis direction , the Y-axis is perpendicular to the X-axis on the earth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More