

Cooperative control policy based on secure communication of multiple unmanned aerial vehicles
A technology for safe communication and collaborative control, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., can solve the problem of increasing the overall transmit power of the drone group, reducing node performance, and multiplexing channel interference. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0065] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings. The content of the specific embodiments is not intended to limit the protection scope of the present invention.
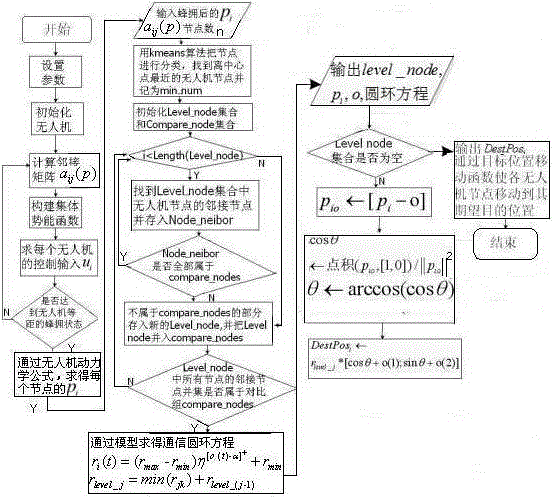
[0066] A collaborative control strategy based on safe communication of multiple drones, including the following steps:
[0067] Step 1: Use the Olfati-saber swarming control algorithm of the variable speed virtual leader to perform preliminary coordinated control of the drone group to make the entire multi-drone group reach an equidistant swarming state;
[0068] Step 1.1: Set the parameters, set the number of drone nodes n, the swarming distance between drones d, the communication spectrum bandwidth W, and the transmission power P i t , The maximum number of iterations Iter_times;
[0069] Step 1.2: Initialize the drone, initialize the initial position p of the drone i in Euclidean space i , And the initial velocity v of UAV i in Euclidean...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More