

A method for planning a local path of a water surface unmanned ship
A technology for local path planning and unmanned boats, applied in computer parts, image data processing, instruments, etc., to achieve excellent recognition rate and detection speed, and achieve the effect of smooth segmentation and summation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
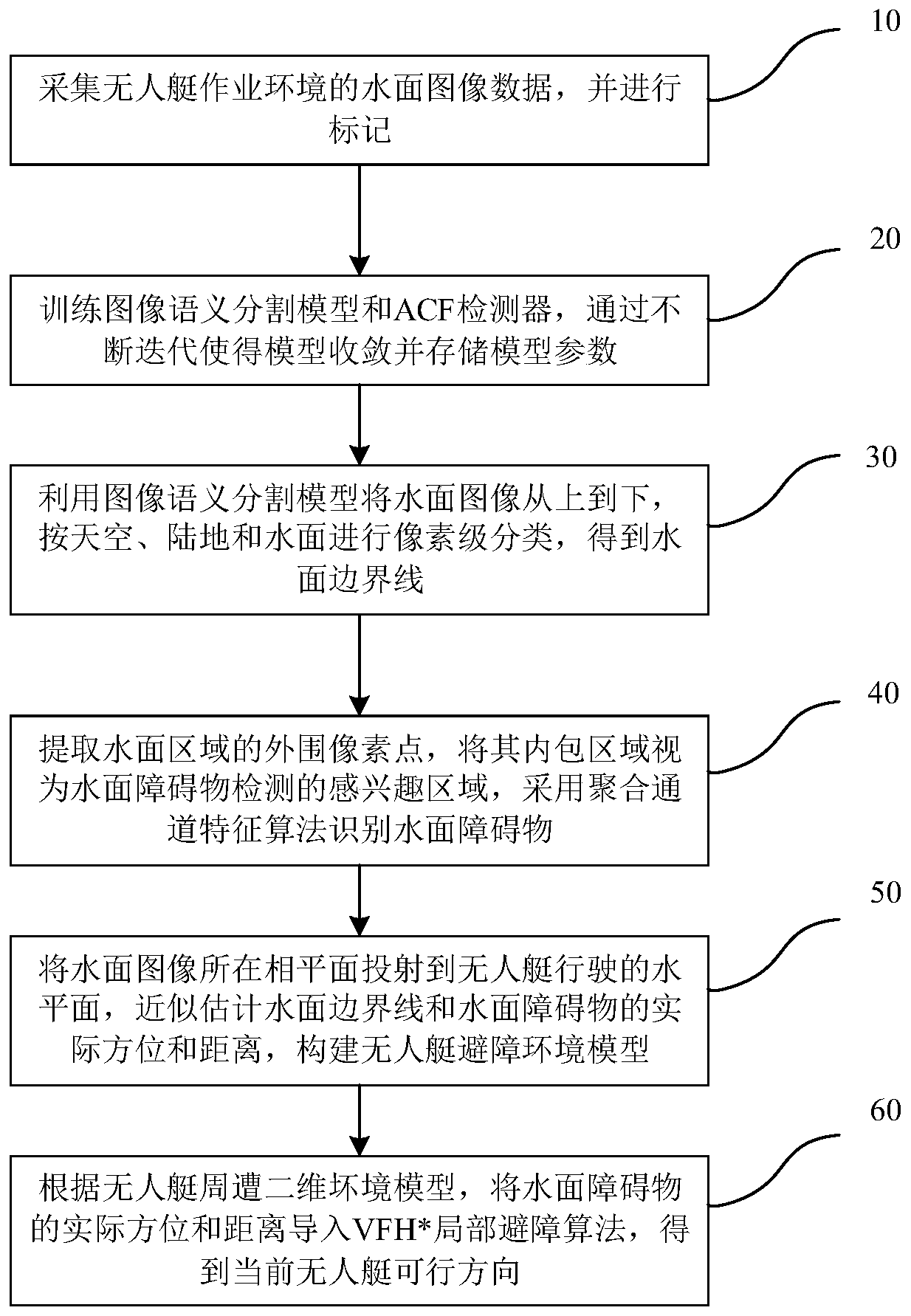
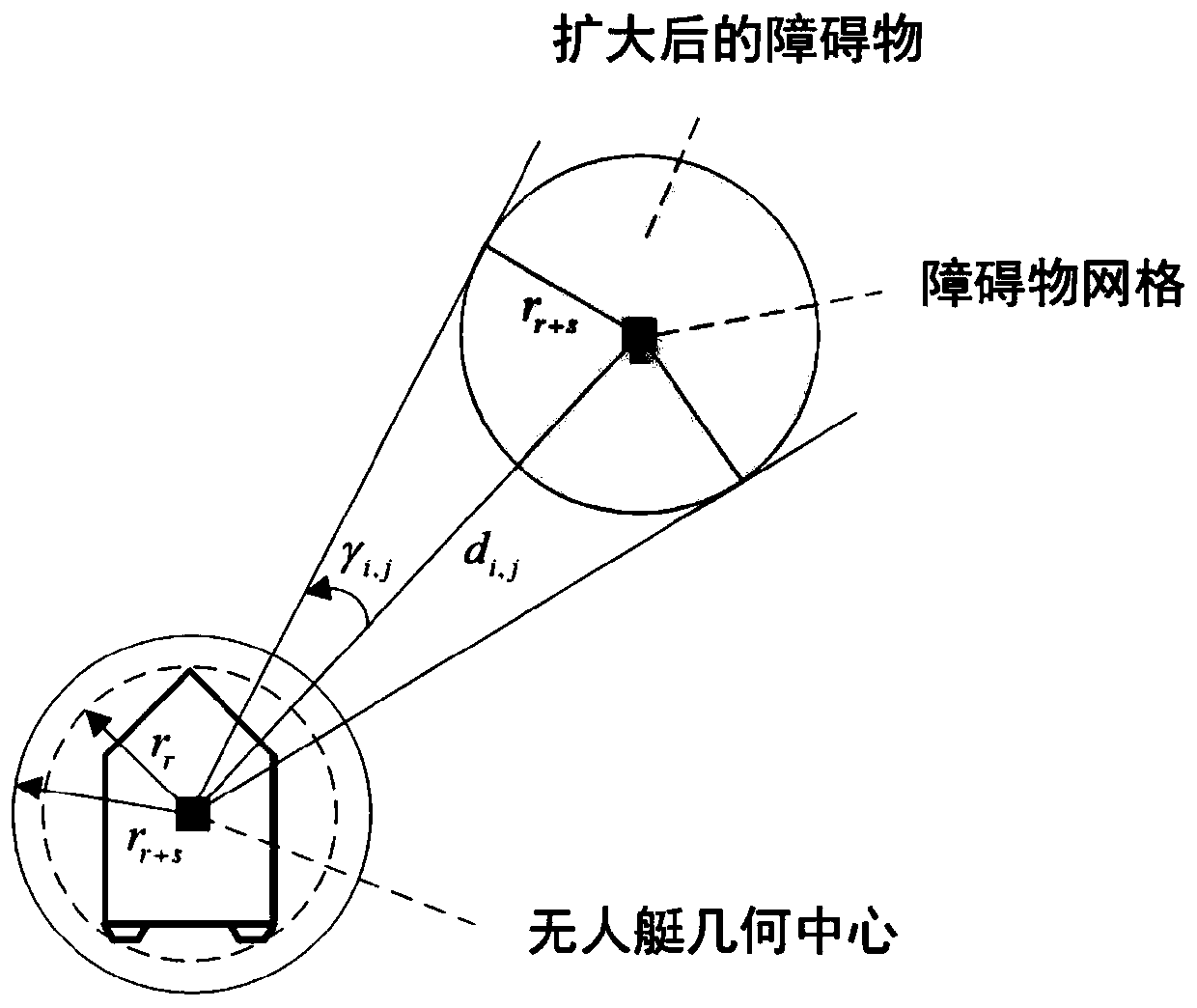
[0054] A local path planning method for surface unmanned boats, such as figure 1 shown, including the following steps:
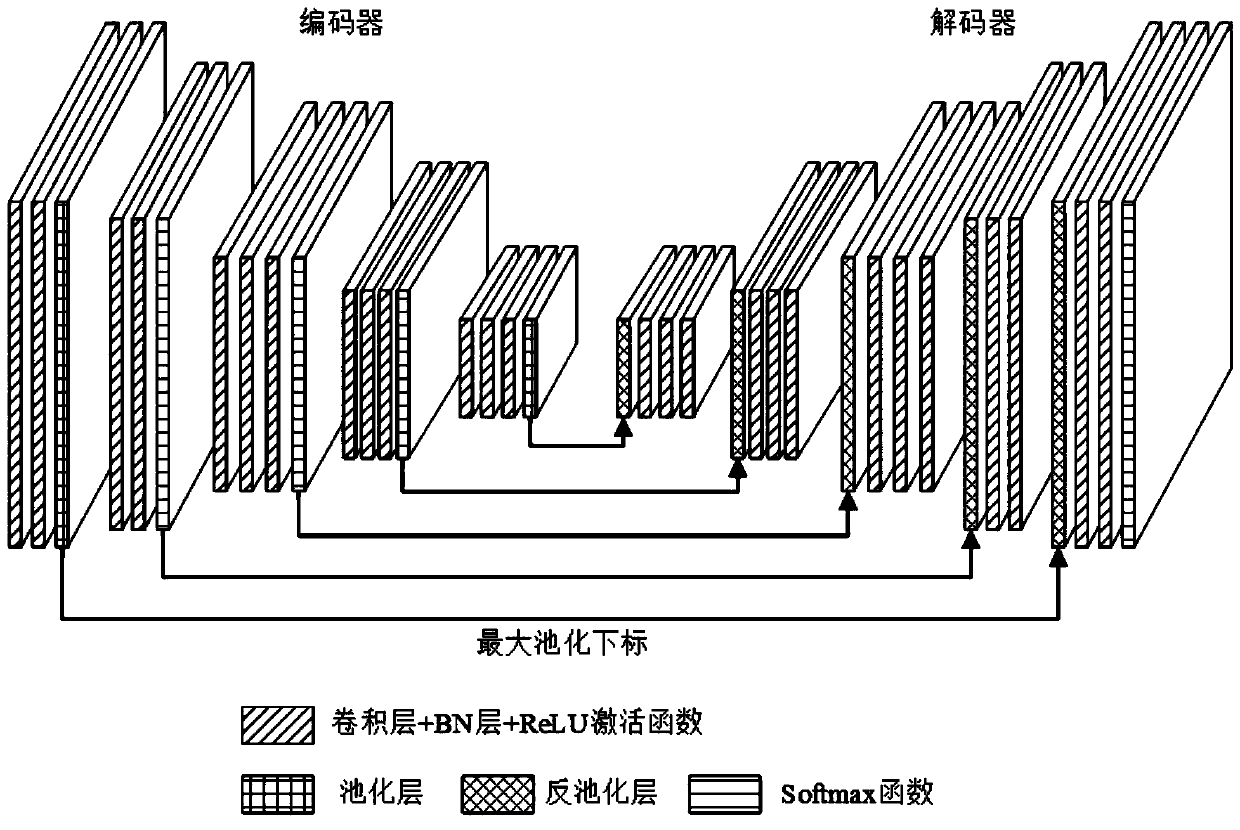
[0055] The first step is to collect and mark the water surface image data of the operating environment of the unmanned boat; specifically: the water surface image captured by the boat-mounted network camera is obtained through the RTSP video stream protocol, and the semantic segmentation model training set divides the water surface image at the pixel level From top to bottom, it is marked as sky, land and water. Each pixel is marked as a category, while the ACF detector training set uses a rectangular frame to select water surface obstacles. The marked data is [x, y, width, height], which respectively represent the pixel abscissa and pixel ordinate of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More