

Multi-surface mark fusion-based lane level locating method
A positioning method, a technology of ground marking, applied in the direction of instruments, character and pattern recognition, computer parts, etc., can solve the problem of unable to continue to estimate the position of the vehicle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
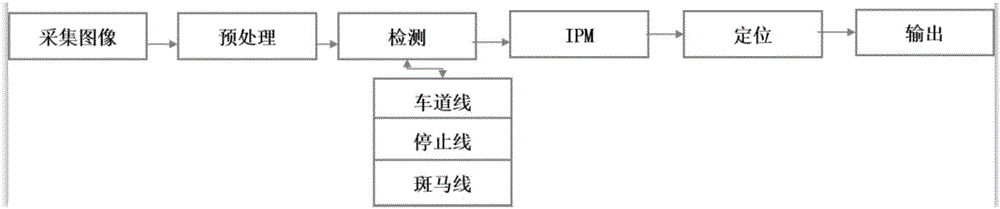
[0044] The embodiment of the present invention provides a lane-level positioning method based on the fusion of multiple ground signs, using the images collected by the AVT camera installed directly under the rearview mirror of the smart car to provide the lateral deviation distance of the vehicle and the longitudinal distance at the intersection in real time information, and then know the real-time position of the vehicle in the lane, such as figure 1 Shown, the present invention has taken following technical scheme:
[0045] Step 1: Sensor Installation and Calibration
[0046] Install the camera directly below the rearview mirror of the smart vehicle and parallel to the longitudinal coordinate axis of the vehicle body. When installing the camera, ensure that clear lane line images on both sides of the vehicle can be collected; calibrate the camera, and the calibrated field of view is : Width 1500cm, far 2000cm.
[0047] Step 2: Image preprocessing
[0048] According to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More