

Planar two-foot robot movement testing platform
A technology of robot motion and test platform, applied in the field of robots, can solve problems such as inability to automatically adjust speed and insufficient constraints, and achieve the effect of reducing shaking and ensuring experimental conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
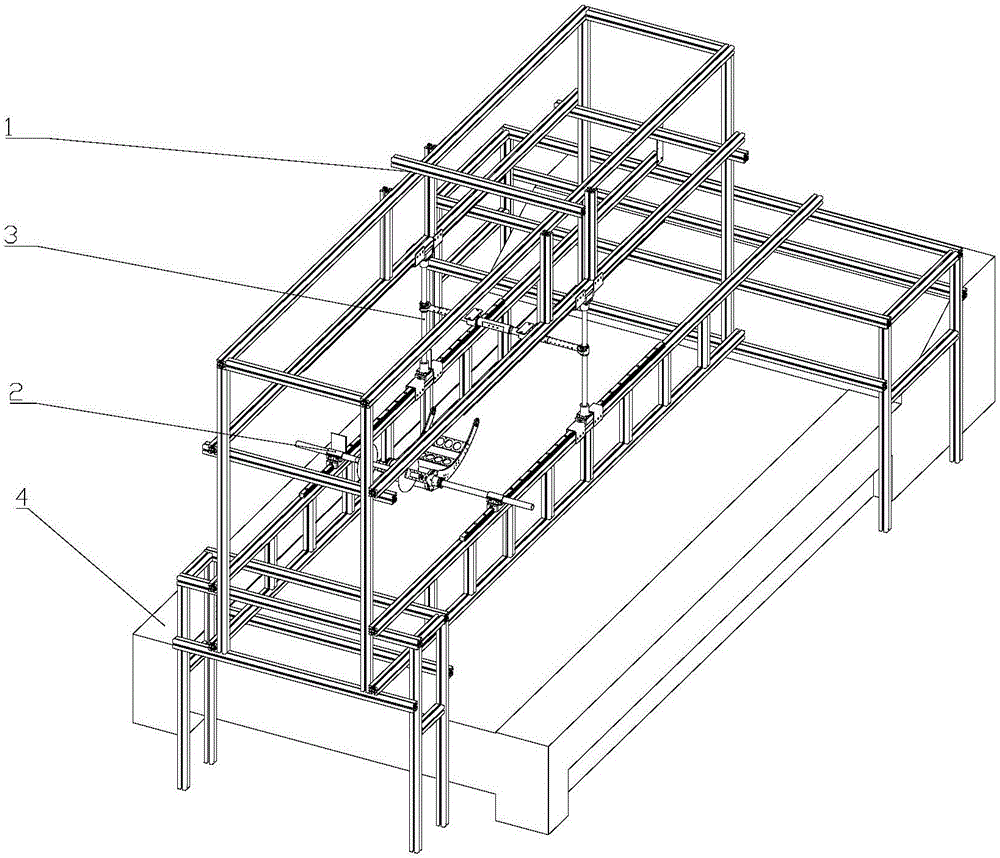
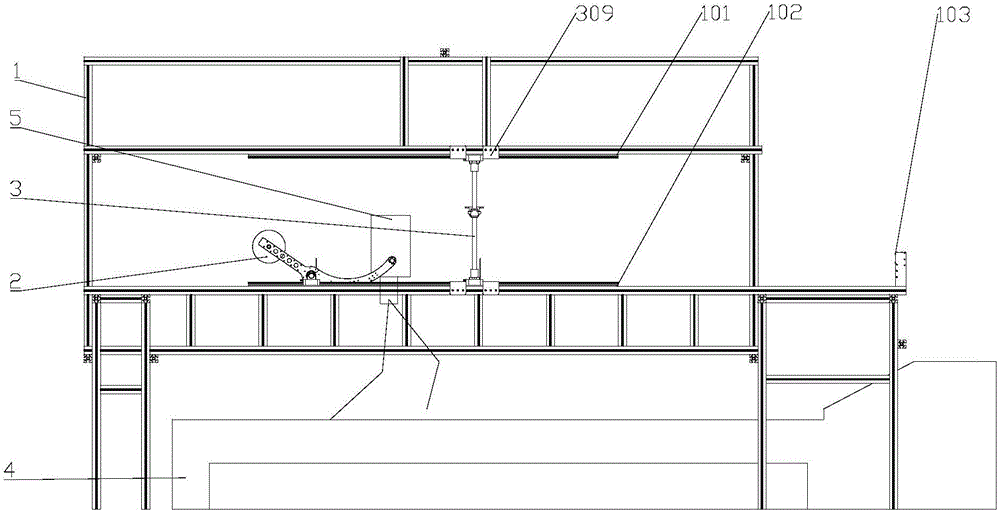
[0024] Such as Figure 1-2 As shown, a planar biped robot motion test platform includes a support 1, a walking restraint device 2, a running restraint device 3, and a treadmill 4;
[0025] The support 1 is arranged above the treadmill 4. The support 1 has an upper guide rail 101 and a lower guide rail 102. A laser displacement sensor 103 is installed on the support 1. A safety rope is suspended on the support 1 for suspending the robot at ordinary times.
[0026] The walking restraint device 2 is slidably arranged on the lower guide rail 102, and the running restraint device 3 is arranged between the upper guide rail 101 and the lower guide rail 102;
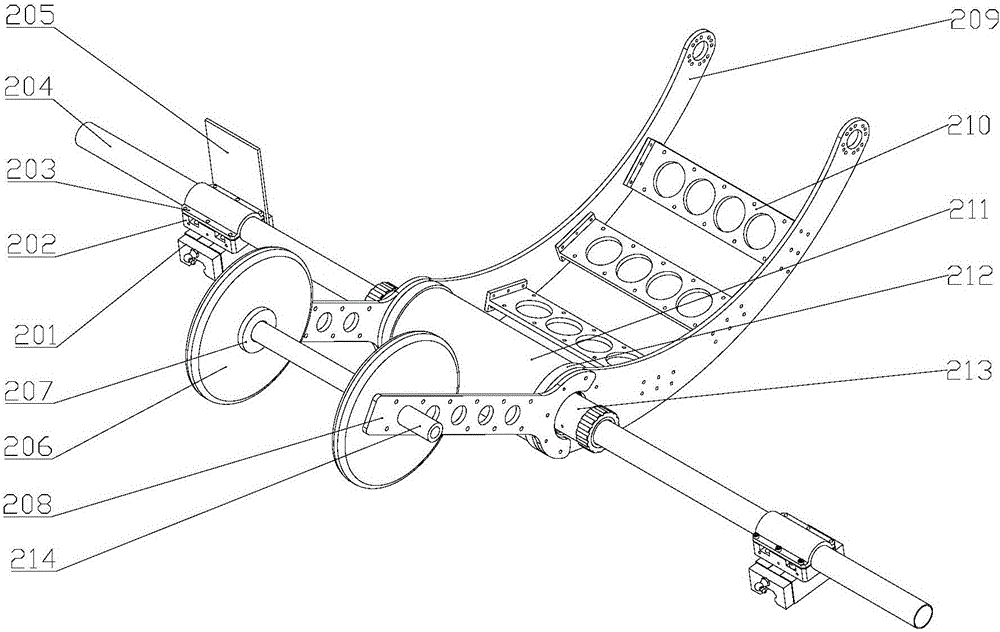
[0027] Such as image 3 As shown, the walking restraint device 2 includes a first slider 201, a cross bar support 202, a cross bar cover 203, a cross bar 204, a first reflector 205, a balance weight 206, a lock cover 207, a weight Balance plate 208, arc-shaped plate 209, connecting plate 210, connecting cylinder 211, rotating ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More