

Spherical-hexapod shape shifting robot
A robot, spherical technology, applied in the field of robots, can solve problems such as single movement mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The conception, specific structure and technical effects of the present invention are clearly and completely described below in conjunction with the embodiments and accompanying drawings, so as to fully understand the purpose, scheme and effect of the present invention. It should be noted that the embodiments in the present application and the features in the embodiments can be combined without conflict. In addition, the descriptions such as up, down, left, and right used in the present invention are only relative to the positional relationship of the various components of the present invention in the drawings.
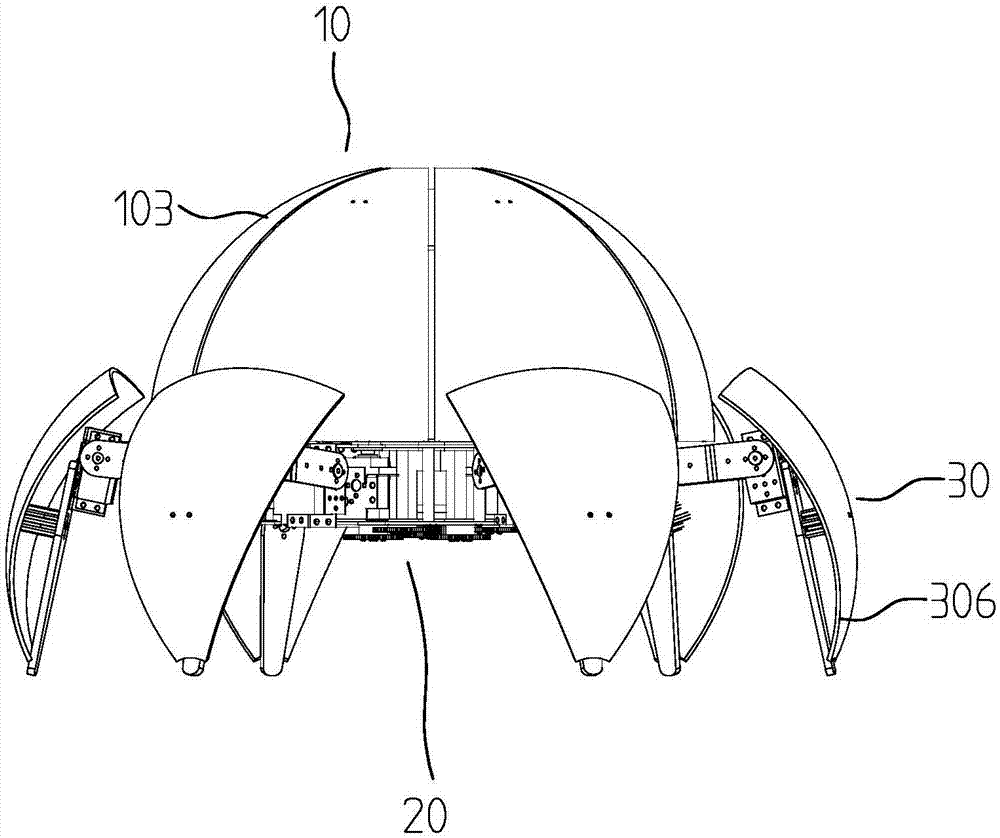
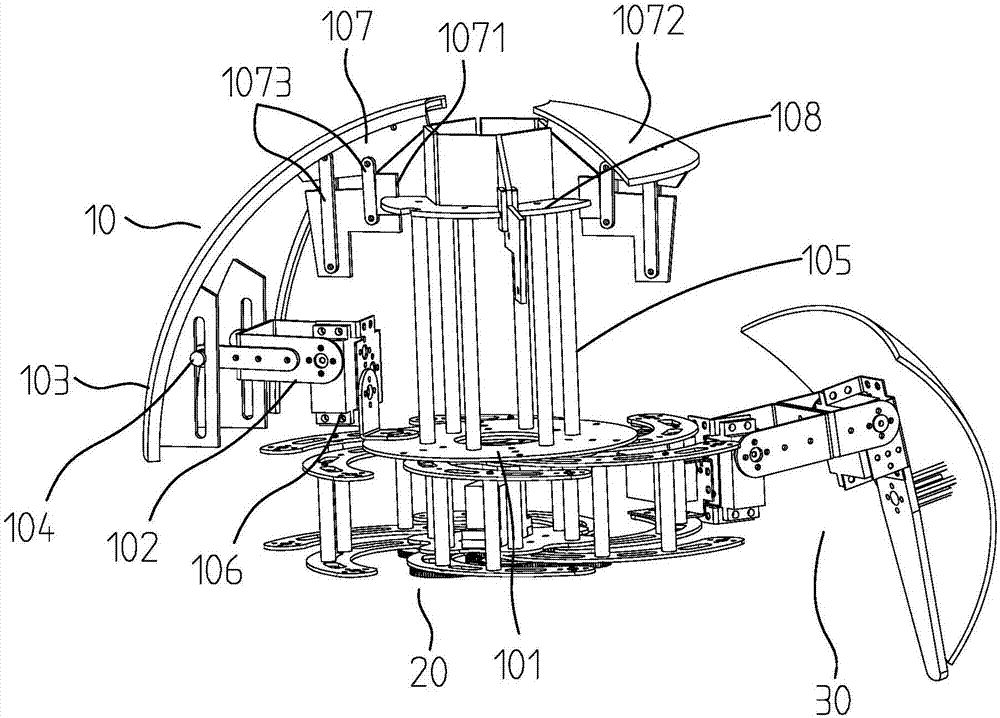
[0021] figure 1 It is a front view of an embodiment of the present invention, figure 2 It is a structural diagram of the rotating mechanism of the present invention in an extended state, referring to figure 1 and figure 2 , a spherical-hexapod deformed robot, comprising an outrigger 10, a rotating mechanism 20, and a robot leg 30. When in a hexapod mode, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More