

Control method and device for transformation robot, and transformation robot
A technology of a control device and a control method, which is applied in the field of robots, can solve problems such as low practicability and transformation between robot forms, and achieve the effect of improving practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
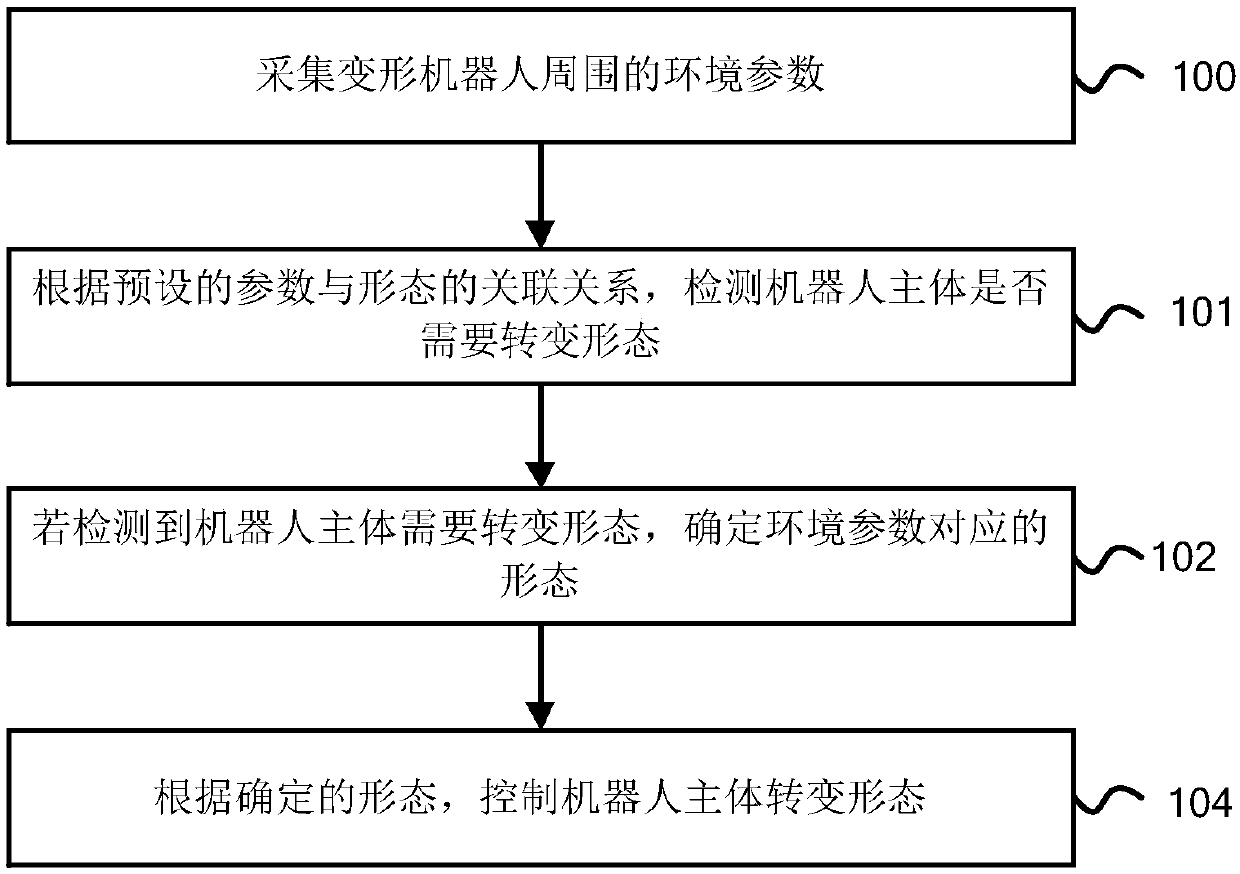
[0052] figure 1 It is a flow chart of the first embodiment of the control method of the deforming robot of the present invention, such as figure 1 As shown, the control method of the deformation robot of this embodiment may specifically include the following steps:
[0053] 100. Collect environmental parameters around the deforming robot.
[0054] The deformable robot in this embodiment may include a deformable robot body. For example, the deformable robot body in this embodiment may be transformed between, but not limited to, a human-shaped state and a vehicle-shaped state, such as a human-shaped state and an animal-shaped state, Vehicle-shaped state and animal-shaped state, etc. Transforming robots perform corresponding actions in different forms.
[0055] In a specific implementation process, the deformation robot may need to operate in different forms under different environments. Therefore, in order to avoid artificial manipulation of the deformation robot, the operati...
Embodiment 2
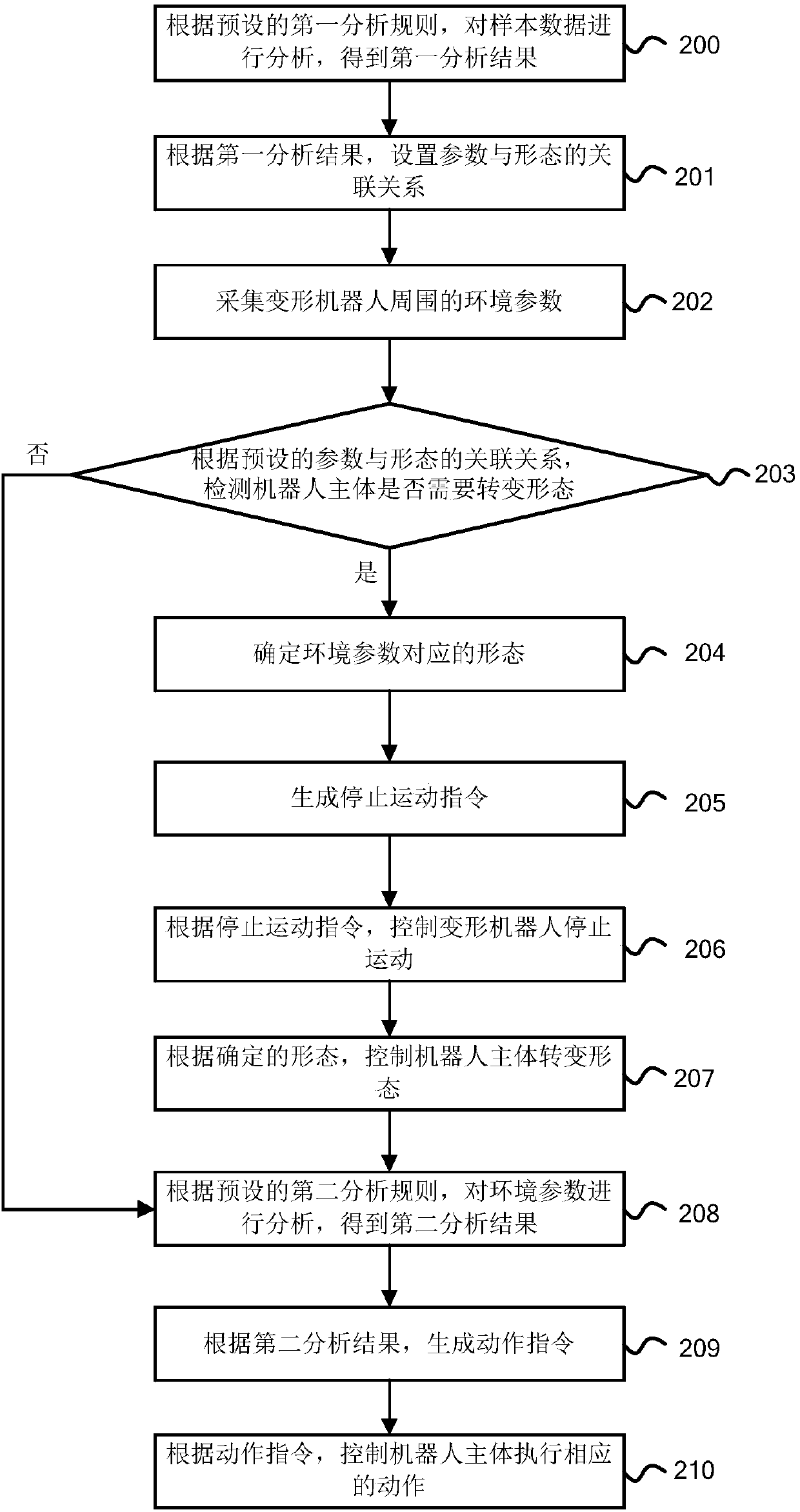
[0066] figure 2 It is the flow chart of the second embodiment of the control method of the deforming robot of the present invention, such as figure 2 As shown, the control method of the deformation robot of this embodiment is as follows: figure 1 On the basis of the illustrated embodiment, the technical solution of the present invention is further described in more detail.
[0067] like figure 2 As shown, the control method of the deformation robot of this embodiment may specifically include the following steps:
[0068] 200. According to a preset first analysis rule, analyze the sample data to obtain a first analysis result.
[0069] In this embodiment, artificial intelligence technology can be applied to the deformation robot, and a large number of various environmental parameters corresponding to each shape are input to the deformation robot as sample data. According to the preset first analysis rule, the deformation robot can The sample data is analyzed to obtain a ...
Embodiment 3
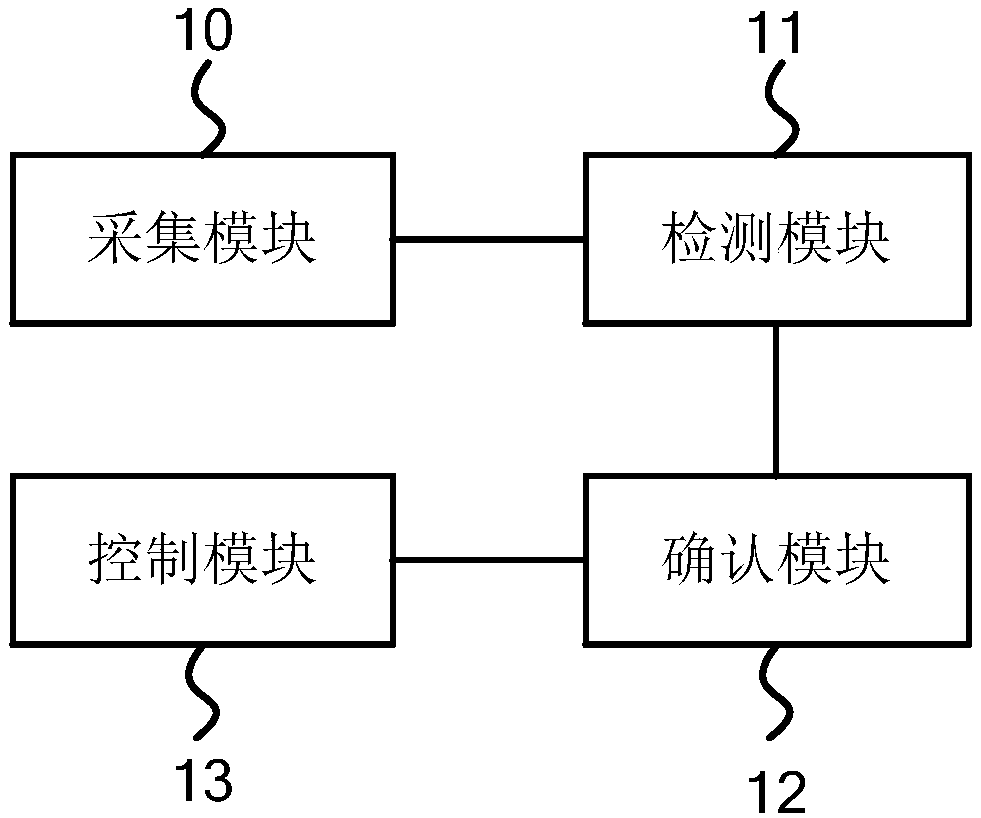
[0099] image 3 It is a schematic structural diagram of Embodiment 1 of the control device of the deformation robot of the present invention, wherein the deformation robot of this embodiment includes a deformable robot body, and the device includes a collection module 10 , a detection module 11 , a determination module 12 and a control module 13 .
[0100] The collection module 10 is used to collect the environmental parameters around the deformation robot;
[0101] The detection module 11 is used for detecting whether the shape-changing robot needs to change shape according to the relationship between the preset parameters and the shape;
[0102] The determination module 12 is used to determine the shape corresponding to the environmental parameters if the detection module 11 detects that the shape-changing robot needs to be transformed;
[0103] The control module 13 is configured to control the robot body to transform into a shape according to the determined shape.
[010...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More