

Remote control six-football-shaped deformable robot
A robot and remote control technology, applied in the field of remote control robots, can solve problems such as lack of convenient movement, affect the efficiency of remote control robots, and take a long time to move remote control robots, so as to achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
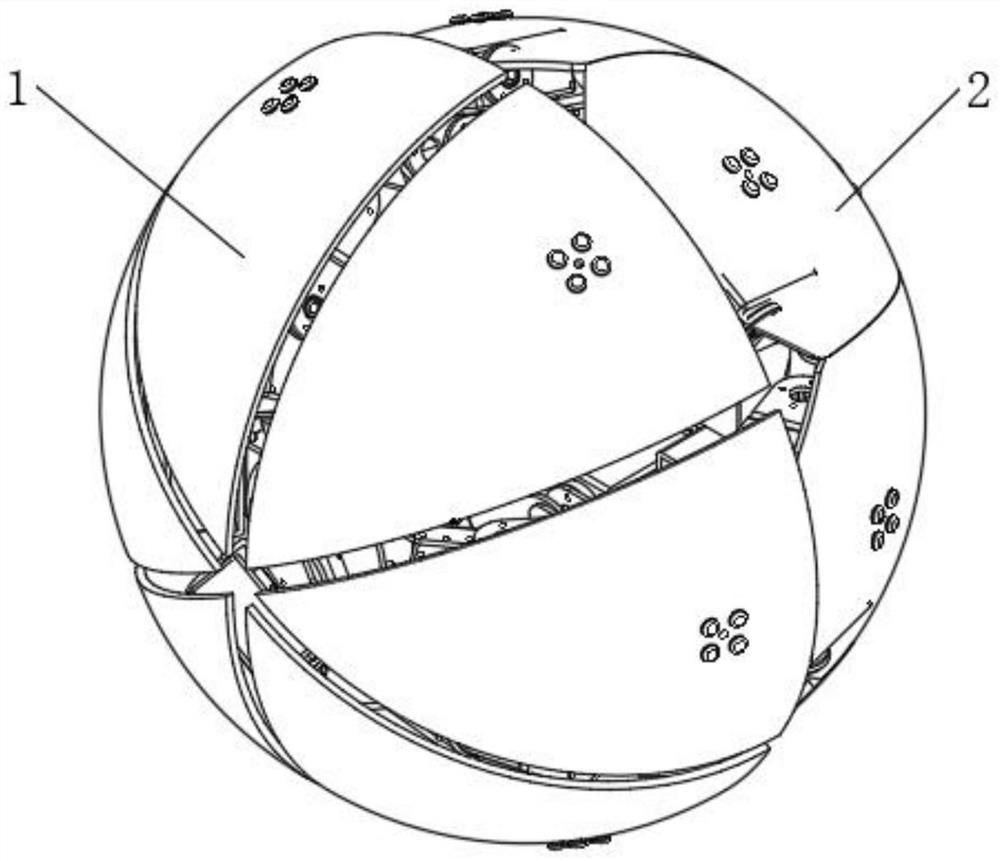
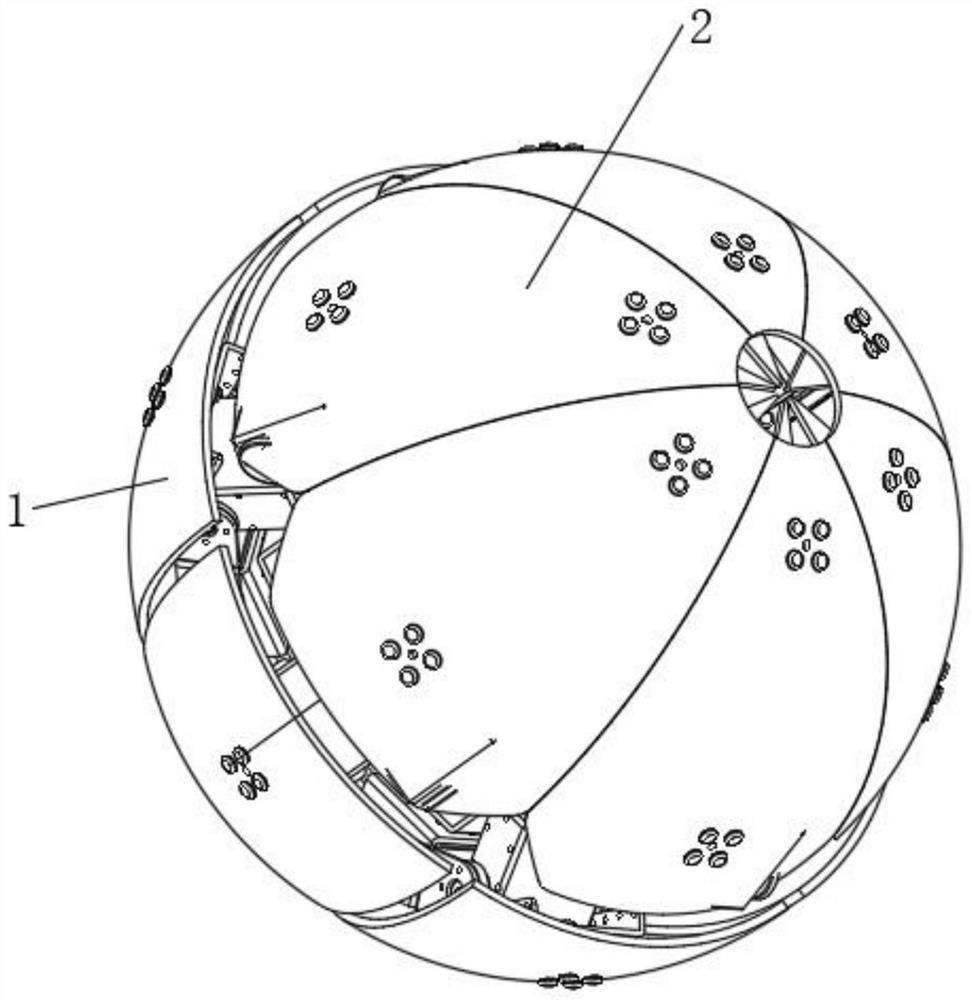
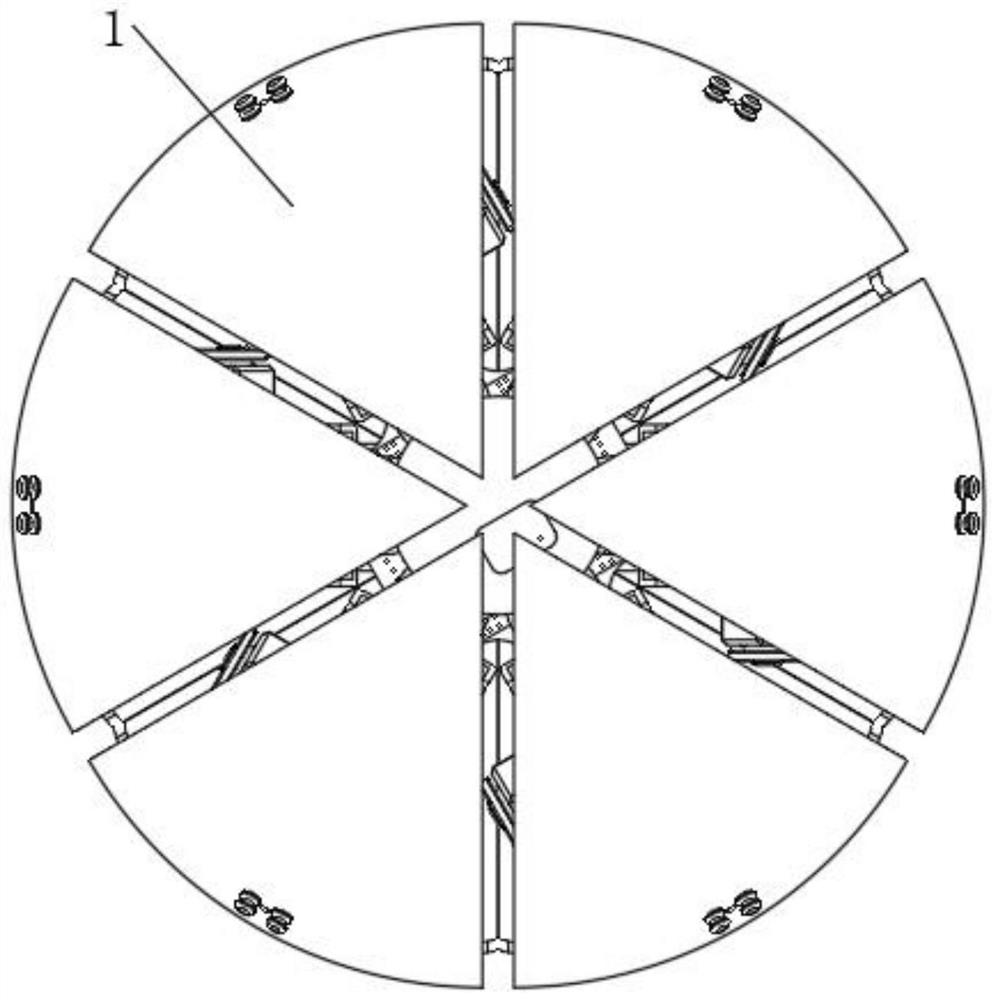
[0054] like Figure 1-2 and Figure 4-7 As shown, the present invention provides a technical solution: a remote control hexapod-shaped deformable robot includes an upper half shell 1 and a remote control 8, the bottom half shell 1 is provided with a lower half shell 2, and the interior of the upper half shell 1 is provided with a lower half shell 2 The upper body 3, the outer surface of the upper body 3 is provided with an upper mechanical arm 4, the upper mechanical arm 4 includes a first steering gear 41 arranged on one side of the upper half shell 1, the outer surface of the first steering gear 41 and the first side bracket 43 The inner wall of the first long U-shaped frame 44 is connected with one side of the second long U-shaped frame 48 through the second bolt. By setting the second bolt, the first long U-shaped frame 44 and the second long U-shaped frame are connected. The long U-shaped frames 48 have good stability to avoid the separation of the first long U-shaped fr...
Embodiment 2
[0057] like Figure 1-7 As shown, the bottom of the upper body 3 is fixedly connected with a connecting rod 5, the bottom end of the connecting rod 5 is fixedly connected with a lower body 6, the outer surface of the lower body 6 is provided with a lower mechanical arm 7, and the lower mechanical arm 7 includes the interior of the lower body 6. The crotch steering gear 71 is provided, the output end of the crotch steering gear 71 is fixedly connected with a third long U-shaped frame 72, and one side of the third long U-shaped frame 72 is fixedly connected with a fourth long U-shaped frame 73 through a fourth bolt, The inside of the fourth long U-shaped frame 73 is provided with a leg steering gear 74 , the output end of the leg steering gear 74 is fixedly connected with a steering frame 75 , and a foot steering gear 76 is arranged on one side of the steering frame 75 . The output end of the steering gear 76 is fixedly connected with a fifth long U-shaped frame 77, the inner wa...
Embodiment 3
[0060] like Figure 7 As shown, the remote controller 8 includes a circuit board 81, and one side of the circuit board 81 is provided with a communication sending module 10. By setting the communication sending module 10, the remote controller 8 can normally send out signals, so that the robot can normally use the communication receiving module 9 to receive signals. To prevent the remote controller 8 from sending out signals normally, the robot cannot work normally. One side of the circuit board 81 is provided with a left joystick 82, one side of the circuit board 81 is provided with a power button 83, and one side of the circuit board 81 is provided with a left joystick 82. A knob 84 is arranged on the side, and a right rocker 85 is arranged on one side of the circuit board 81. By setting the remote controller 8, the robot can be controlled through a wireless local area network during work, which is convenient for the robot to move or roll normally.
[0061] In this embodimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More