Unmanned aerial vehicle collaborative operation system and unmanned aerial vehicle collaborative operation method
A dual-drone, operating system technology, applied in the direction of control/regulation systems, non-electric variable control, instruments, etc., can solve the problem of battery capacity reduction, reduction of equipment carried by drones, waste of working time and unmanned aerial vehicles. Quantity and other issues to achieve the effect of avoiding danger
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described in detail through the drawings and examples below. Through these descriptions, the features and advantages of the present invention will become more apparent.
[0056] The word "exemplary" is used exclusively herein to mean "serving as an example, embodiment, or illustration." Any embodiment described herein as "exemplary" is not necessarily to be construed as superior or better than other embodiments. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
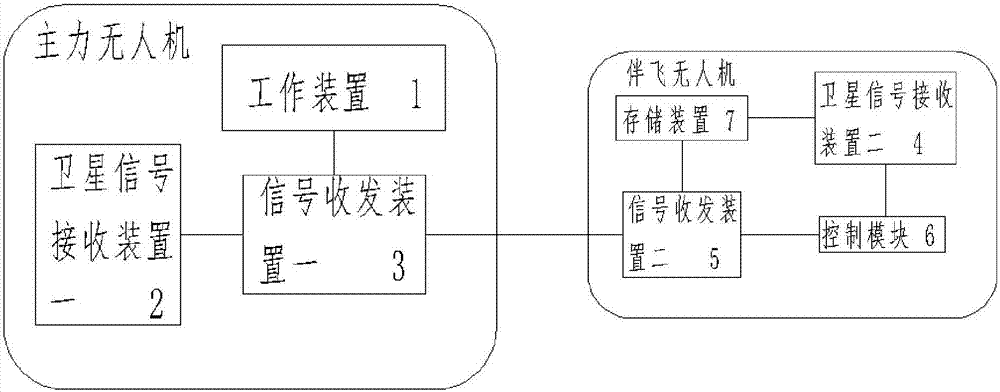
[0057] According to a kind of dual unmanned aerial vehicle cooperative operation system provided by the present invention, such as figure 1 As shown in , the system includes a main drone and an accompanying drone, and the main drone and the accompanying drone work together; the main drone and the accompanying drone described in the present invention are all Commonly used UAVs are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com