

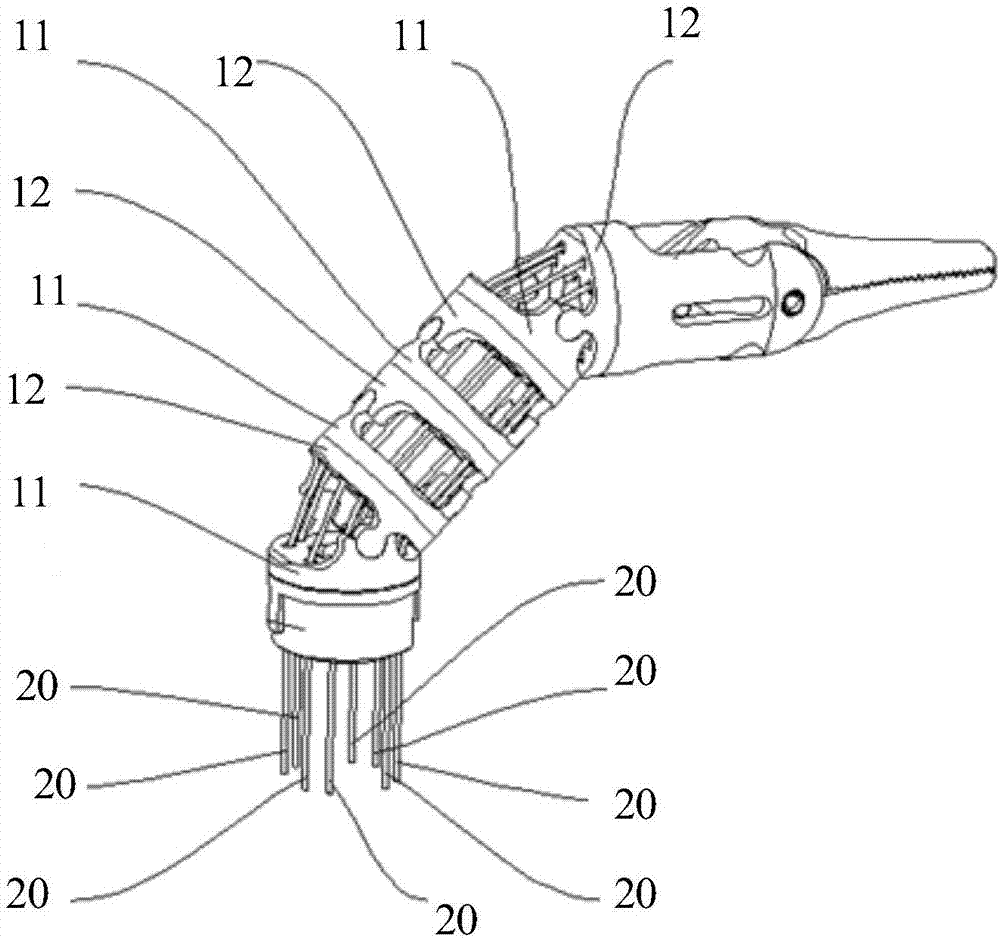
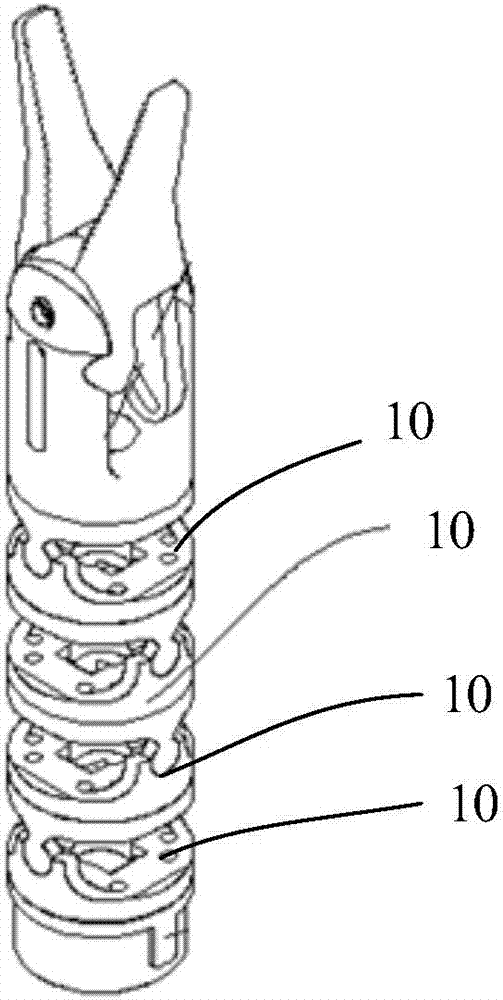
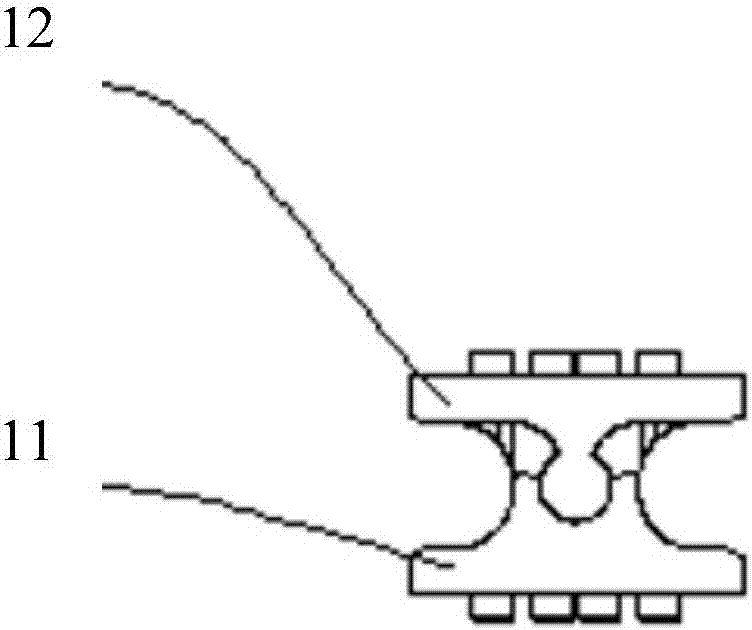
Snake-like joint for surgical robot, surgical instrument and endoscope
A technology of surgical robots and joints, applied in the field of medical equipment, can solve problems such as low motion precision, cumbersome assembly, and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The serpentine joints for surgical robots, surgical instruments and endoscopes proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that all the drawings are in a very simplified form and use imprecise scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention. In particular, each drawing needs to display different emphases, and often adopts different proportions.
[0031] In this application, "proximal end" and "distal end", "lower end" and "upper end" are relative orientations, relative positions, directions of elements or actions relative to each other from the perspective of a physician using the medical device, although "Proximal" and "distal", "lower" and "upper" are not limit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More