

A stability control method for differential power steering of electric vehicles driven by in-wheel motors
A technology of stability control and in-wheel motor, applied in the direction of automatic steering control components, power steering mechanism, steering rods, etc., can solve problems such as danger and instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
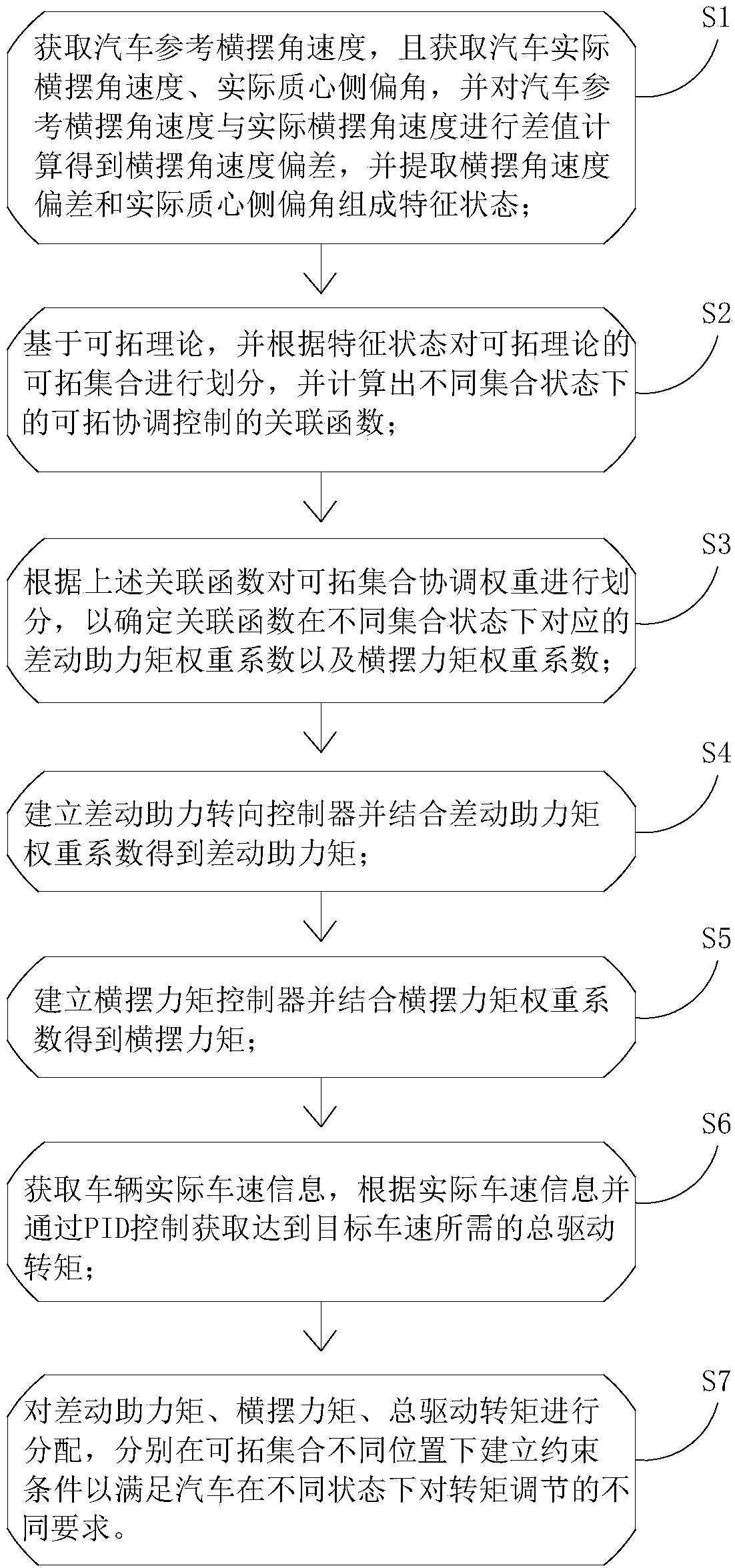
[0071] Such as figure 1 , figure 2 as shown, figure 1 , figure 2 The invention proposes a method for controlling the stability of a differential power steering of an electric vehicle driven by an in-wheel motor.
[0072] refer to figure 1 , figure 2 , the hub motor drive electric vehicle differential power steering stability control method that the present invention proposes, comprises the following steps:
[0073] S1. Obtain the reference yaw rate of the car, and obtain the actual yaw rate and the actual side slip angle of the car, and calculate the difference between the reference yaw rate and the actual yaw rate of the car to obtain the yaw rate deviation, and extract the yaw rate The deviation and the actual center-of-mass sideslip angle constitute the characteristic state;
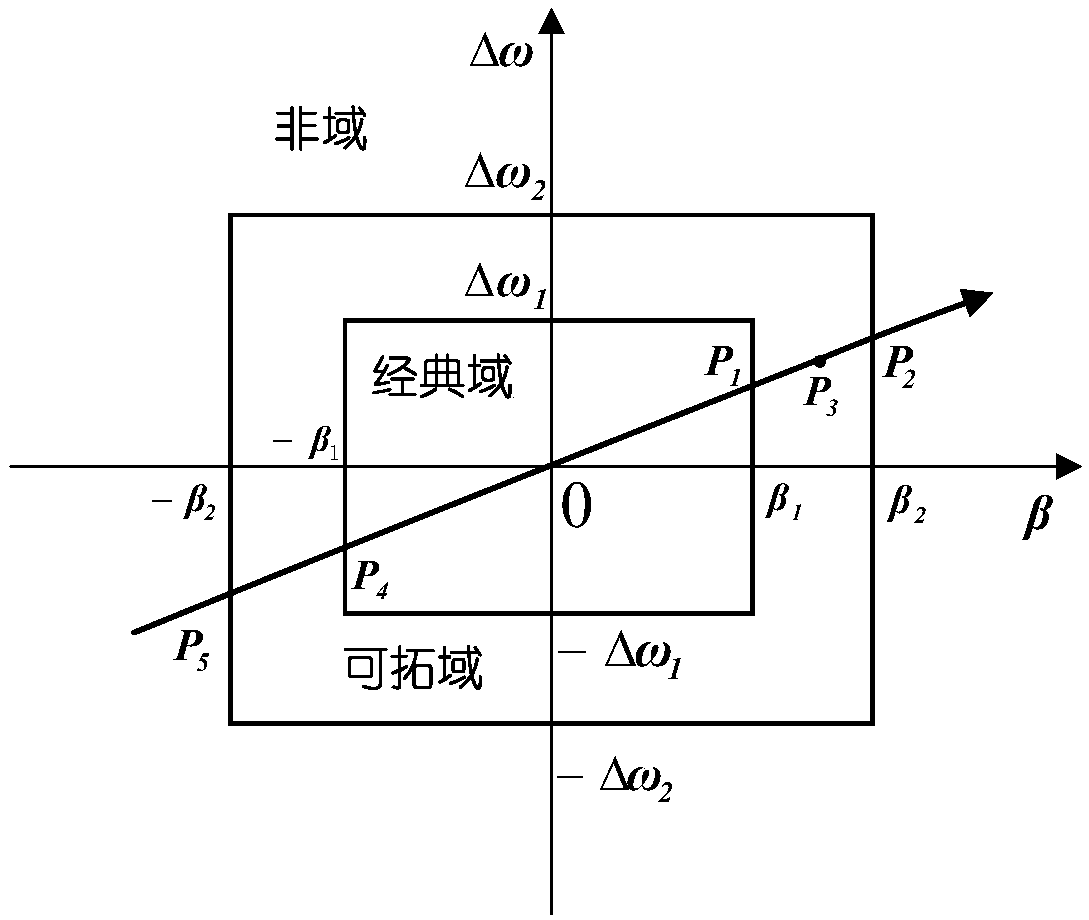
[0074] Specifically, it includes collecting the actual center-of-mass side slip angle β and actual yaw rate ω of the vehicle dynamics model r , and obtain the reference yaw rate and for th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More