

A Lagrangian Dynamic Model and Controller for a Space Tether System
A space tether system, space tether technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve the problem of not considering the target roll angle, unable to reflect the attitude angle of the tethered satellite, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0094] To achieve the above object, the present invention is achieved through the following technical solutions:
[0095] Step 1, establish the coordinate system definition and give the position and angular velocity expressions of the tether system;
[0096] Step 2, establishing the kinetic energy and potential energy of the tether system;
[0097] Step 3, establishing a generalized force model of the tether system;
[0098] Step 4, design the controller according to the established Lagrangian dynamics model.
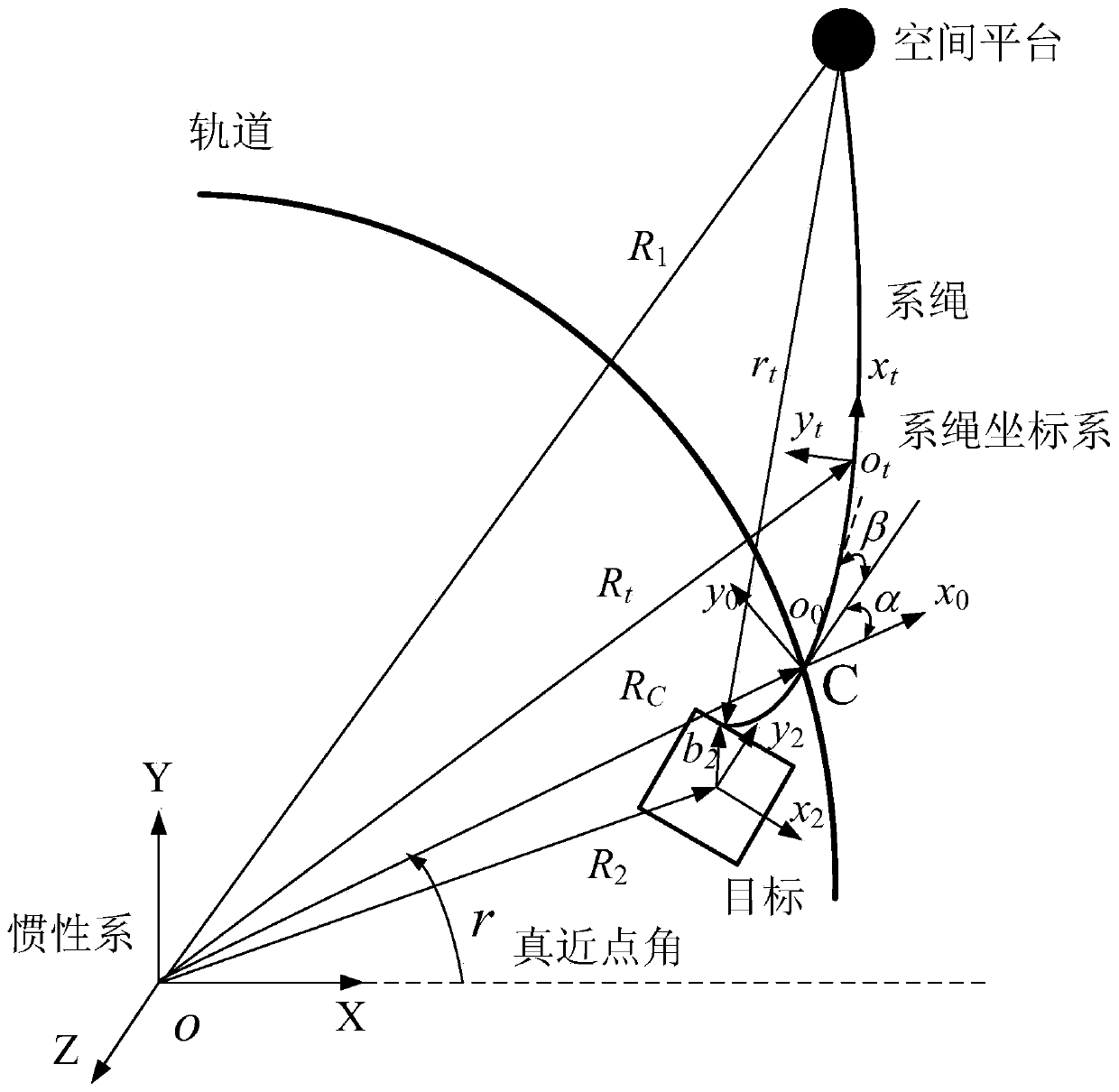
[0099] 1. attached figure 1 It is the definition of the coordinate system of the rope system and the system configuration diagram, where OXYZ is the inertial coordinate system; o 0 x 0 the y 0 z 0 is the orbital coordinate system of the space tether system, and the coordinate origin o 0 Located at the center of mass of the tether system, o 0 the y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More