

Method for avoiding obstacle automatically and robot using the same
An automatic obstacle avoidance and motion technology, applied in the field of robots and automatic obstacle avoidance, can solve problems such as automatic obstacle avoidance, and achieve the effect of efficient service
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
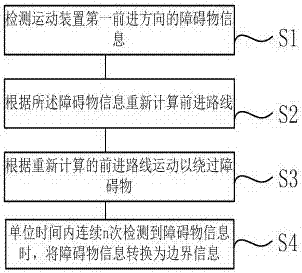
[0018] figure 1 It is a flowchart of an automatic obstacle avoidance method according to an embodiment of the present invention. Please refer to figure 1 , in this embodiment, a method for automatic obstacle avoidance, comprising:
[0019] S1: Detect obstacle information in the first forward direction of the moving device;
[0020] S2: recalculate the advancing route according to the obstacle information;
[0021] S3: move around the obstacle according to the recalculated forward route;
[0022] S4: When the obstacle information is detected n consecutive times within the preset time, the obstacle information is converted into boundary information;
[0023] where n is a natural number.
[0024] For example, the moving device is a robot. The robot starts to move northward according to the preset route, and continuously detects the information of all obstacles located to the north of the robot during the walking process. When an obstacle is detected, recalculate the walkin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More