Robot, control device, and robot system
A robot system and control device technology, applied in the direction of robots, program-controlled manipulators, manipulators, etc., can solve problems such as large spaces, and achieve the effects of avoiding interference, efficient operations, and reducing space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
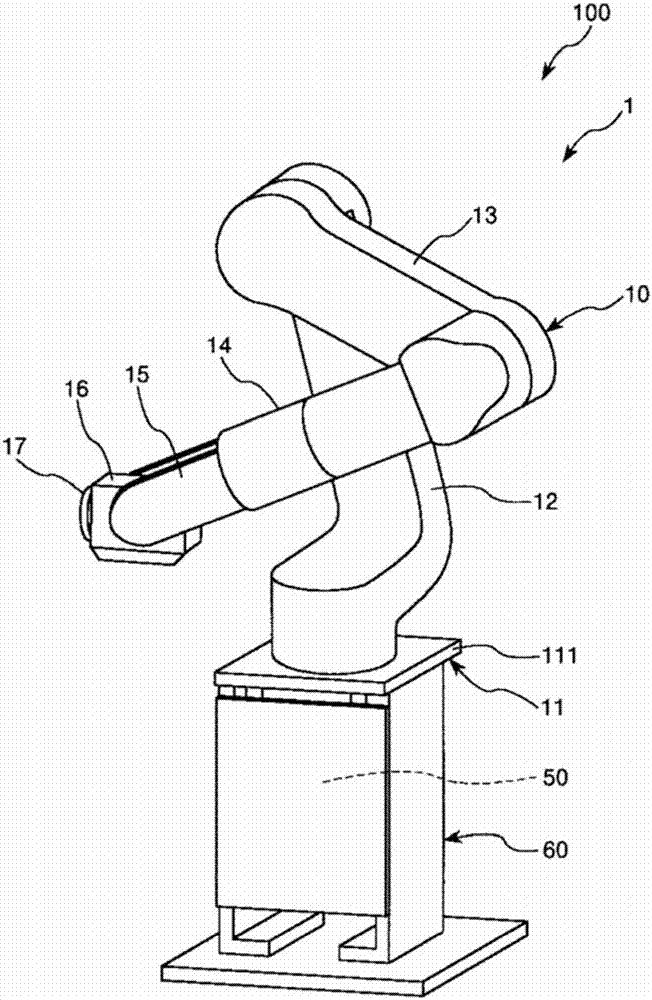
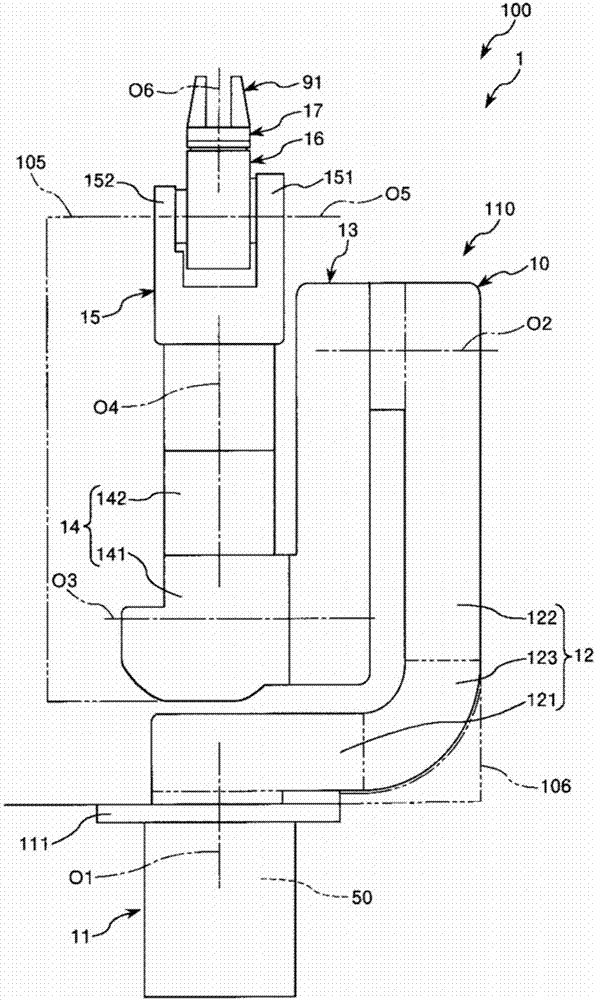
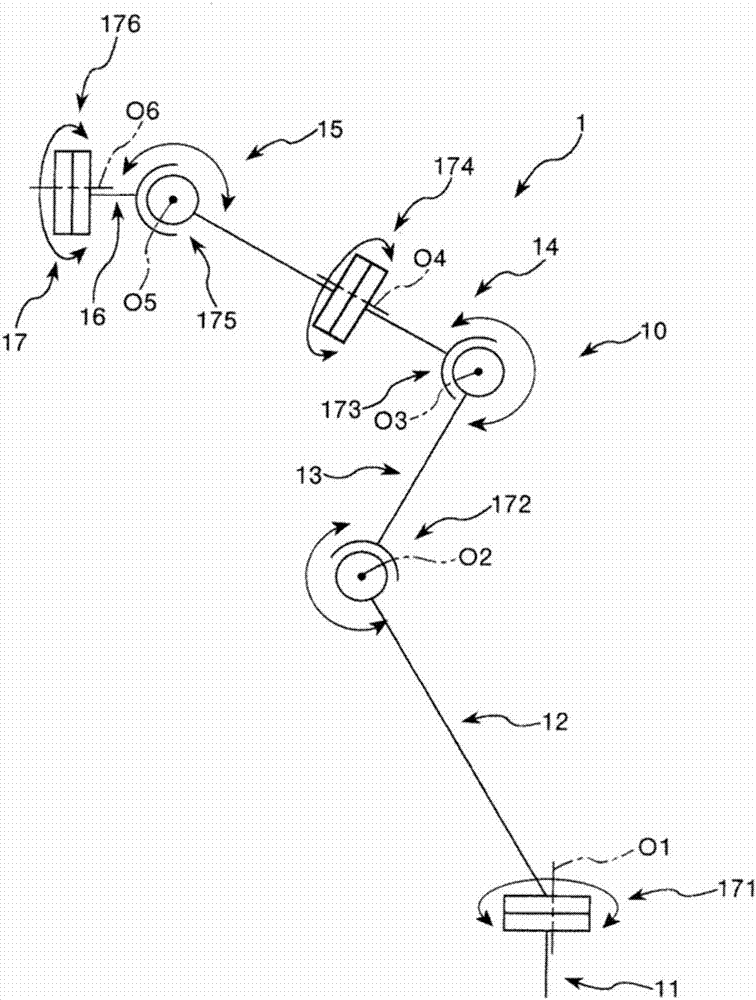
[0051] figure 1 It is a schematic perspective view showing the robot system according to the first embodiment of the present invention. figure 2 yes figure 1 Schematic front view of the robotic system shown. image 3 yes figure 1 A schematic diagram of the robot is shown. Figure 4 yes figure 1 Schematic side view of the illustrated state where the first, second and third arms of the robot do not overlap. Figure 5 yes figure 1 Schematic side view of the shown overlapping state of the first arm, the second arm and the third arm of the robot. Figure 6 yesfigure 1 Schematic side view of the illustrated state where the first, second and third arms of the robot do not overlap.
[0052] In addition, in the following, for the convenience of explanation, the Figure 2 ~ Figure 6 The upper side is referred to as "upper" or "upper", and the lower side is referred to as "lower" or "below". Additionally, the Figure 2 ~ Figure 6 Set the up and down direction in "Vertical Dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com