

Active obstacle avoidance trajectory planning and stable tracking control method for two-wheel self-balancing vehicle
A self-balancing vehicle, stable tracking technology, applied in the direction of non-electric variable control, vehicle position/route/height control, control/adjustment system, etc. Self-balancing car active obstacle avoidance control and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
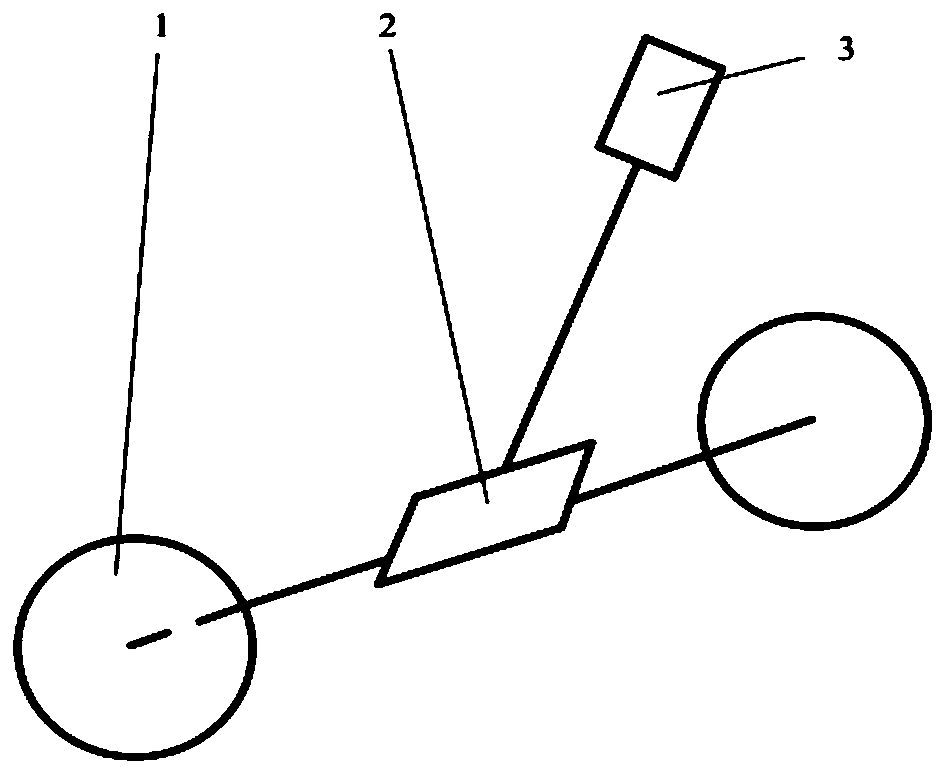
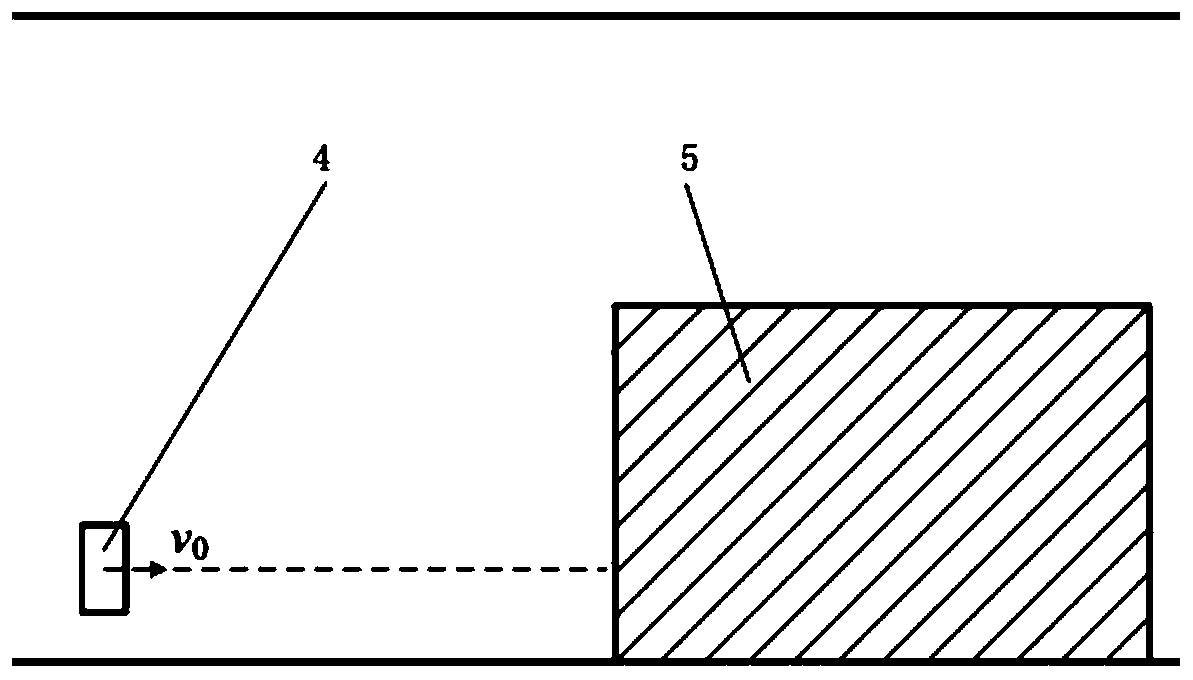
[0048] Such as figure 1 As shown, the two-wheeled self-balancing vehicle involved in the present invention mainly includes parts such as wheels 1, chassis 2 and vehicle body 3. Such as figure 2 As shown, assume that the two-wheeled self-balancing vehicle 4 is moving at a constant speed v along one side of the straight road 0 Driving to the right, there is an obstacle 5 directly ahead, and the road is wide enough. The size of the obstacle is represented by the size of its circumscribed rectangle projected on the horizontal plane, and the distance between its upper side and the initial straight track of the two-wheeled...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More