Positioning compensation system
A compensation system and displacement sensor technology, applied in the field of automation, can solve problems such as poor spraying effect, damage to car surfaces and spraying robots, and achieve high reliability and accurate spraying effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
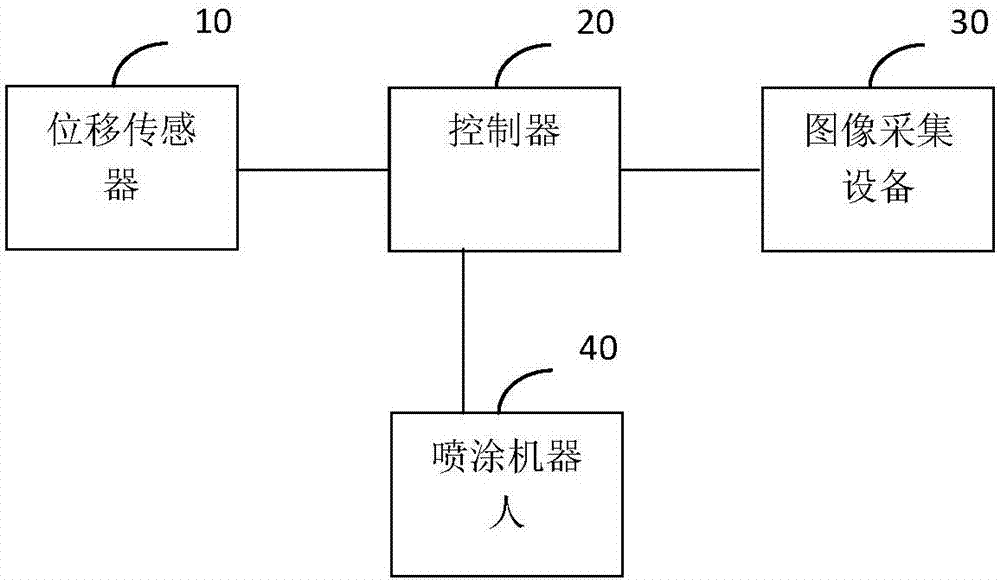
[0026] In a preferred embodiment, as figure 1 As shown, a positioning compensation system is proposed, which is applied to the spraying robot 40 for tracking and spraying automobiles; wherein, it may include:
[0027] a conveying mechanism (not shown in the drawings) for conveying the automobile in a first direction;
[0028] The displacement sensor 10 is used to collect and output the motion information of the conveying mechanism;
[0029] The controller 20 is connected with the displacement sensor 10 to receive and judge the position of the car in the first direction according to the motion information;
[0030] The image acquisition device 30 is connected with the controller 20;
[0031] When the controller 20 judges that the car has reached a standard body position, it controls the image acquisition device 30 to collect the actual body position o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More