

Path control method and device
A path control and path technology, applied in the field of robotics, can solve the problem that the walking path of self-moving robots cannot be applied, and achieve the effect of ensuring coverage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
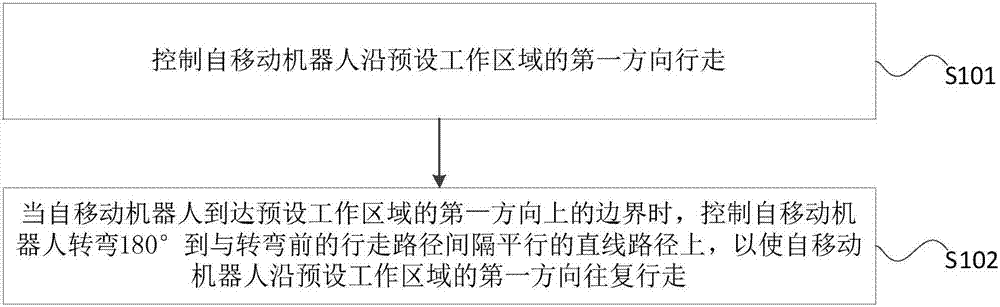
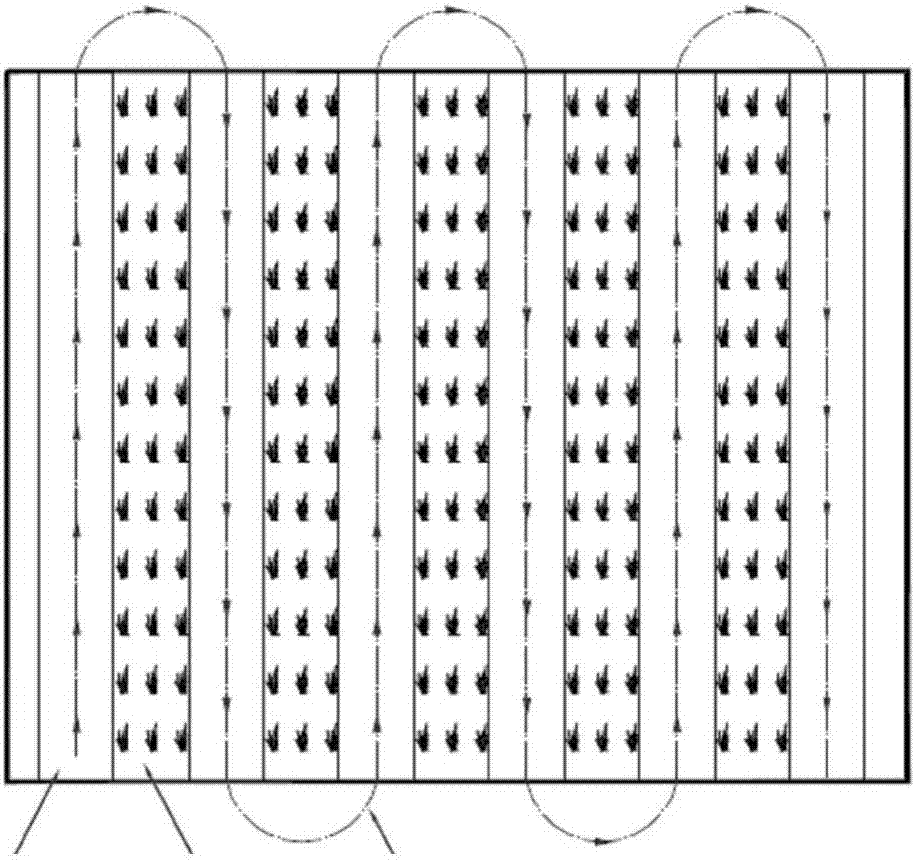
[0036] This embodiment provides a path control method, which is applied to a self-moving robot. The method includes: controlling the self-mobile robot to reciprocate along straight-line paths parallel to each other in a preset working area until it covers the preset working area. During the turning process, the mobile robot at least partially satisfies that the walking path after turning is parallel to the walking path before turning. That is, during the walking process of the self-mobile robot in this embodiment, all or part of the walking paths are parallel to each other, and the parallel spaced walking paths refer to the walking paths before and after each turn.
[0037] In the self-mobile robot of this embodiment, since the walking paths before and after the turn are spaced in parallel, the self-mobile robot can adopt a large turning radius when turning, so that various types of self-mobile robots can realize turning and walking. For large-scale self-mobile robots , especi...
Embodiment 2
[0084] The present embodiment provides a path control device, which includes: a control unit, used to control the self-mobile robot to reciprocate along straight-line paths parallel at intervals in a preset working area until it covers the preset working area, wherein the self-mobile robot At least part of the turning process satisfies that the travel path after the turn is parallel to the travel path before the turn. That is, during the walking process of the self-mobile robot in this embodiment, all or part of the walking paths are parallel to each other, and the parallel spaced walking paths refer to the walking paths before and after each turn.
[0085] In the self-mobile robot of this embodiment, since the walking paths before and after the turn are spaced in parallel, the self-mobile robot can adopt a large turning radius when turning, so that various types of self-mobile robots can realize turning and walking. For large-scale self-mobile robots , especially the crawler-...
Embodiment approach
[0104] As another optional implementation manner, the control unit includes:
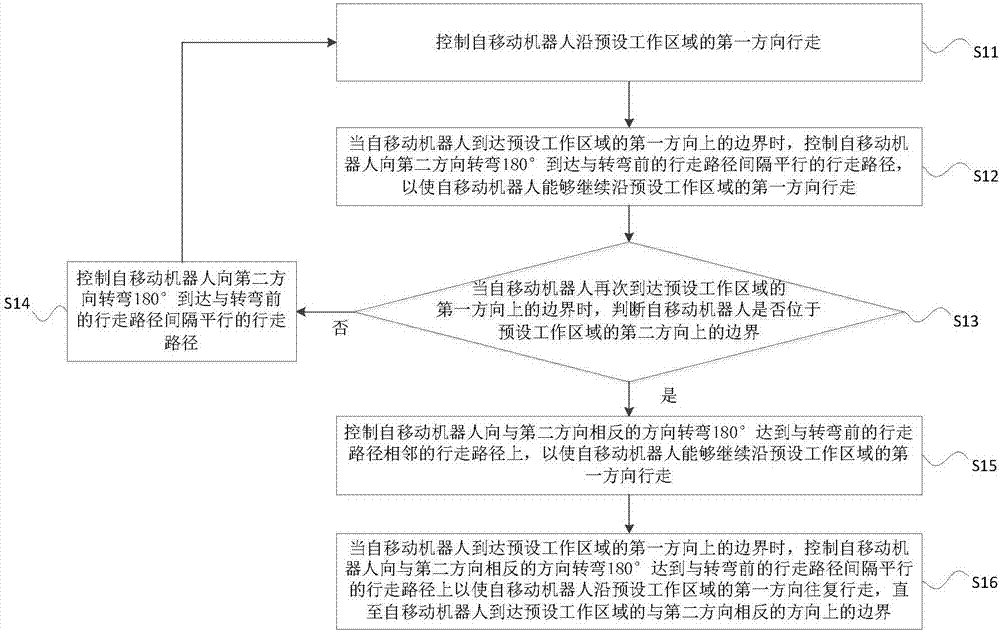
[0105] The third control module is used to execute step S21, controlling the self-mobile robot to walk along the first direction of the preset working area;
[0106] The sixth turning module is used to execute step S22. When the self-mobile robot reaches the boundary in the first direction of the preset working area, control the self-mobile robot to turn 180° in the second direction to reach a distance parallel to the walking path interval before turning. Walking path, so that the self-mobile robot continues to walk along the first direction of the preset working area, wherein the distance between the walking path after turning and the walking path before turning is less than or equal to the working head coverage width of the self-mobile robot, the first The second direction is a direction perpendicular to the first direction, and the first direction includes two opposite directions on the same stra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More