Manipulator
A technology of robotic hand and damper, applied in the field of robotics, can solve the problems of poor grasping effect and poor simulation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
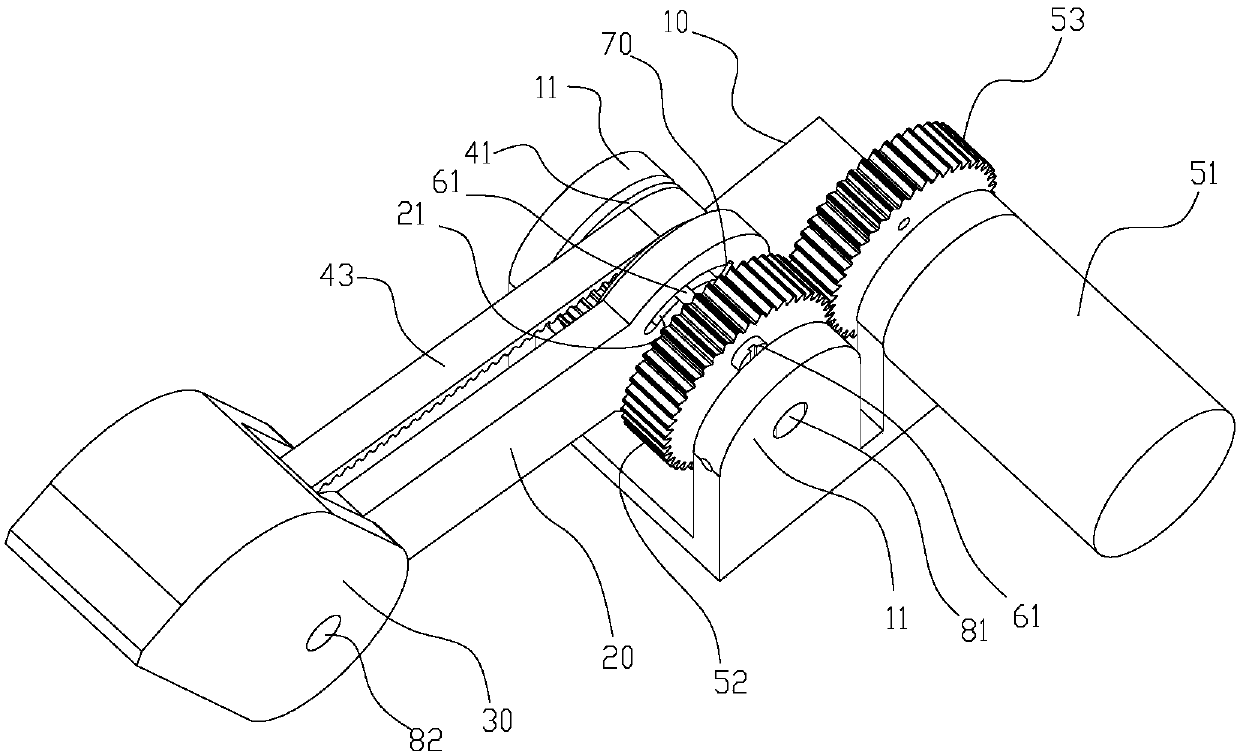
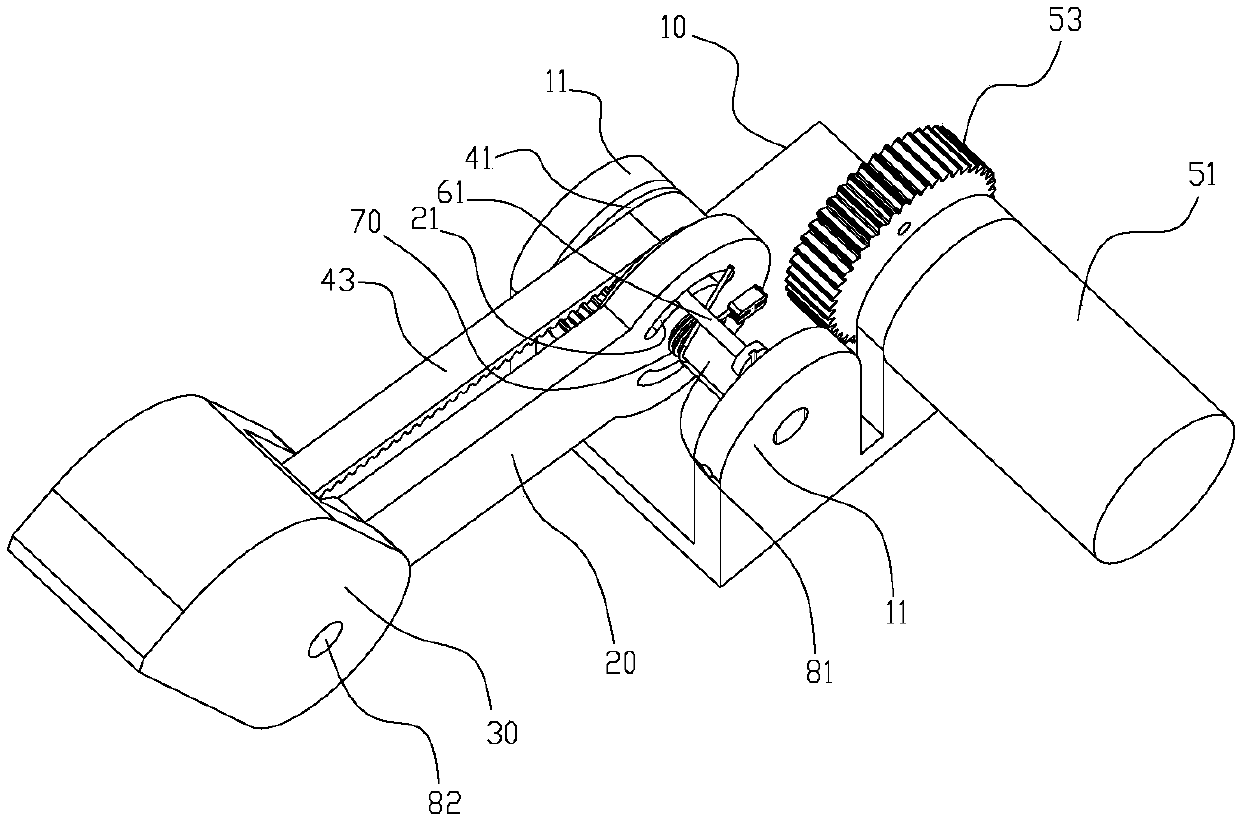
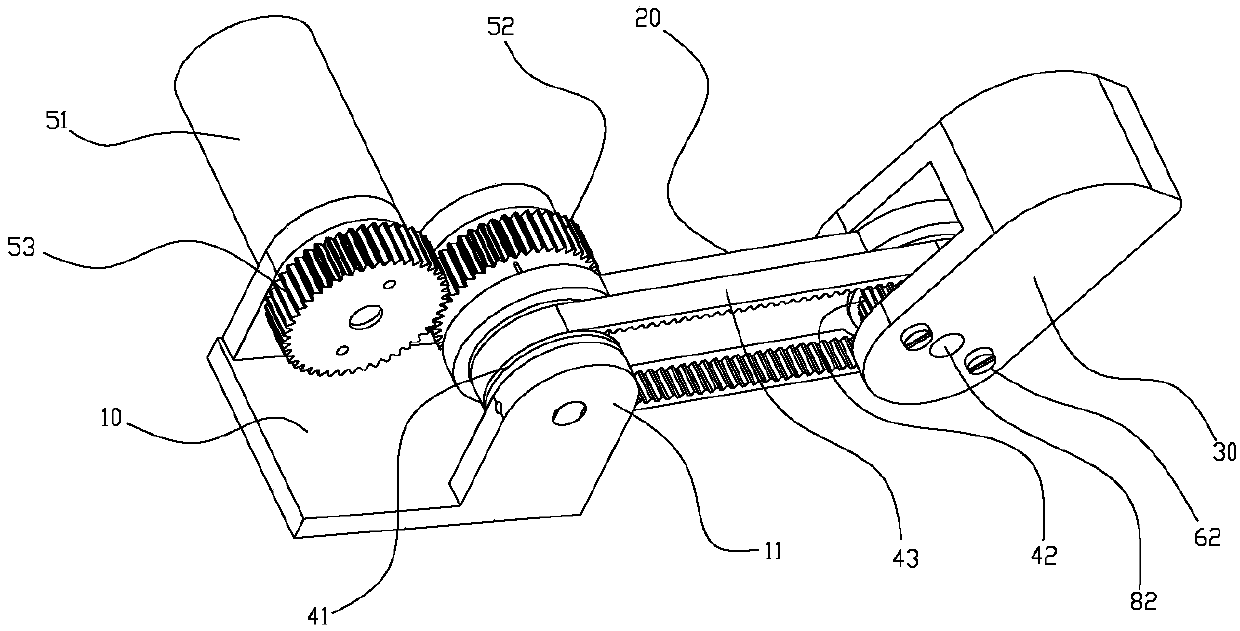
[0034] Such as Figure 1 to Figure 5 As shown, the embodiment of the present invention discloses a robotic hand, which is used for grasping objects 100 such as balls, blocks, and strips. The robotic hand includes a root finger 10, a belly finger 20, a pointed finger 30, a power mechanism and a differential mechanism. The root finger 10 is connected to the fixed device or the mobile device; the abdomen finger 20 is rotatably connected to the root finger 10, and the pointed finger 30 is rotatably connected to the abdomen finger 20; the differential mechanism and the motive mechanism, the abdomen finger 20 and the root Refers to 10 direct or indirect connections. The key of the present invention is: the power mechanism distributes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More