

A geometric solution method for inverse kinematics of 6r robot based on screw theory
A technology of robot kinematics and inverse kinematics, which is applied to manipulators, complex mathematical operations, program-controlled manipulators, etc., and can solve problems such as unsuitable six-degree-of-freedom robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
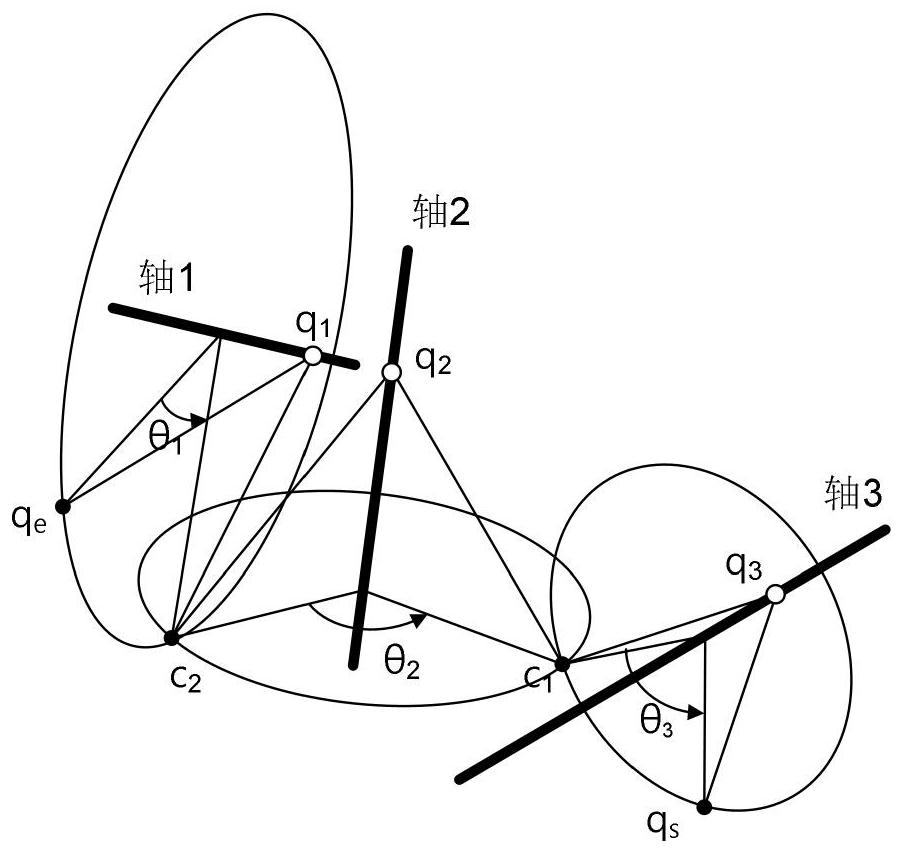
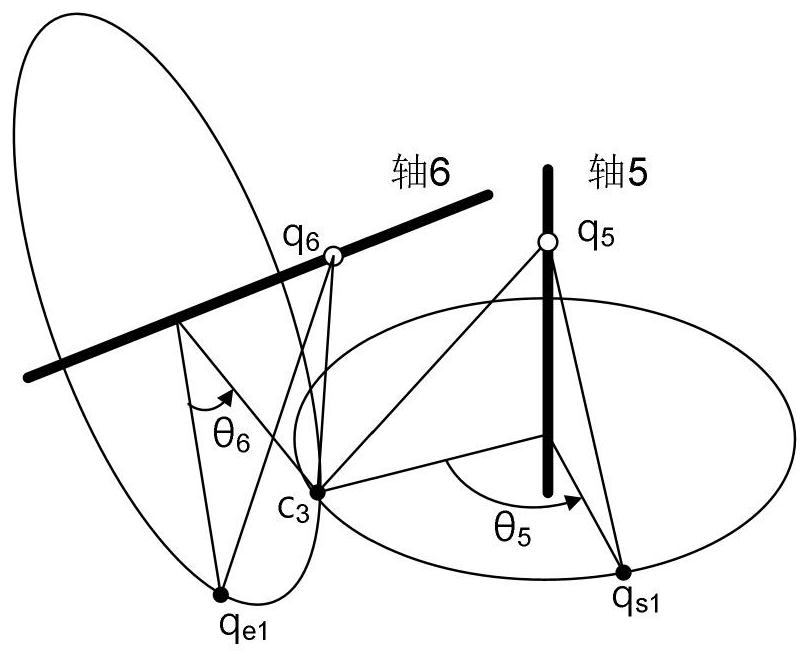
[0017] The following is attached Figure 1-3 The present invention will be described in detail.
[0018] S1 determines the kinematics parameters of the 6R robot and establishes a positive kinematics model
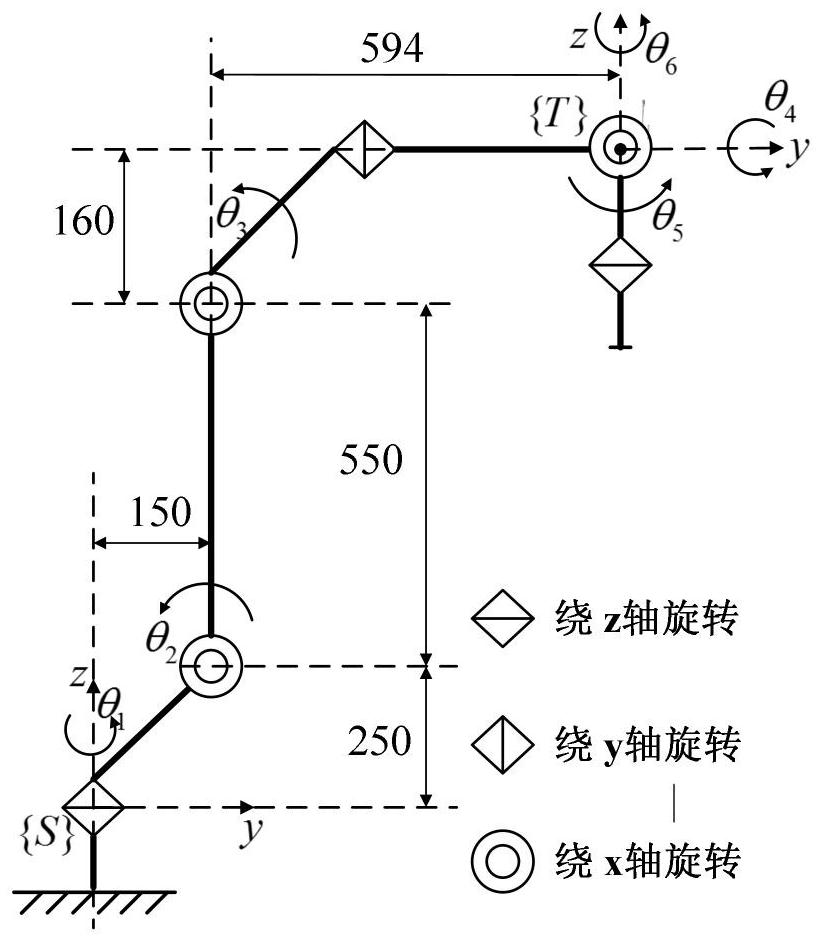
[0019] Such as image 3 As shown, the position vector and rotation vector of each joint in the known initial state of the 6R robot are as follows:
[0020]
[0021]
[0022] where r i , 1≤i≤6 means the position vector of joint i in the base coordinate system, ω i Indicates the rotation vector of the i joint.
[0023] Based on the screw theory, the forward kinematics model of the 6R robot is expressed as,
[0024]
[0025] where g st (θ),g st (0) respectively represent the initial pose and target pose of the robot end, Indicates the exponential product form of the rotation motion of the i joint,
[0026]
[0027] where θ i is the i-th joint angular displacement; is the i joint rotation vector ω i Another form of representation, by ω i =[ω 1 ω 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More