

Indoor real-time positioning and three-dimensional map construction method based on single-line laser
A real-time positioning and three-dimensional map technology, applied in the field of indoor three-dimensional environment map, to achieve low-cost, real-time pose estimation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
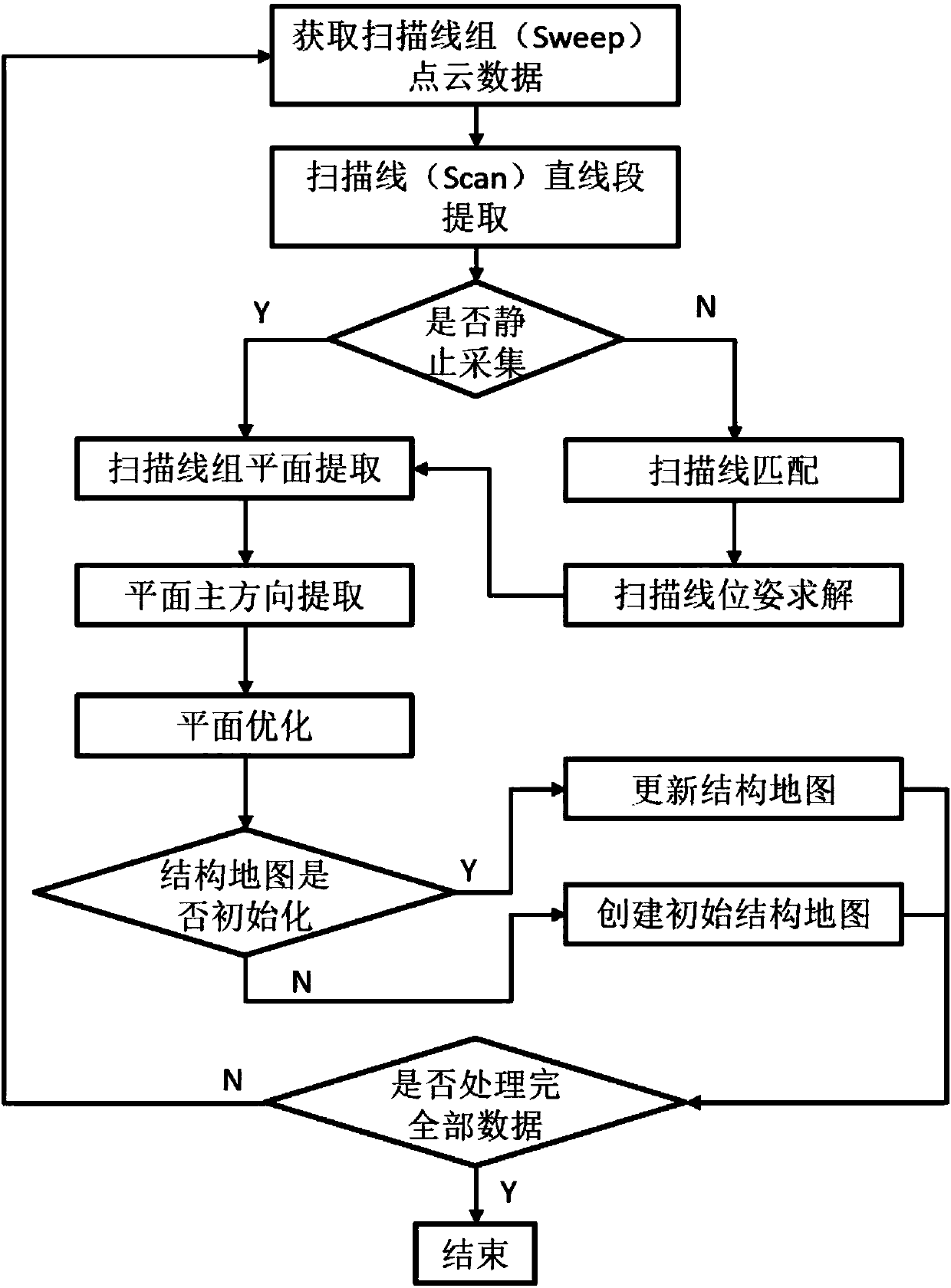
[0020] please see figure 1 , a method for indoor real-time positioning and three-dimensional map construction based on single-line laser provided by the present invention, comprising the following steps:
[0021] Step 1.1: Starting from a starting point on the scanning line, perform least squares straight line fitting on the following 10 scanning points (including the starting point) scanning points, and calculate the fitting error;
[0022] The expression of the fitting error is as follows:
[0023]
[0024] Among them, a, b are straight line fitting pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More