

A Fuzzy Robust Sliding Mode Shaking Motion Control Method for Dual Flexible Space Manipulators
A space manipulator and motion control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as control failure, control effect discount, failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
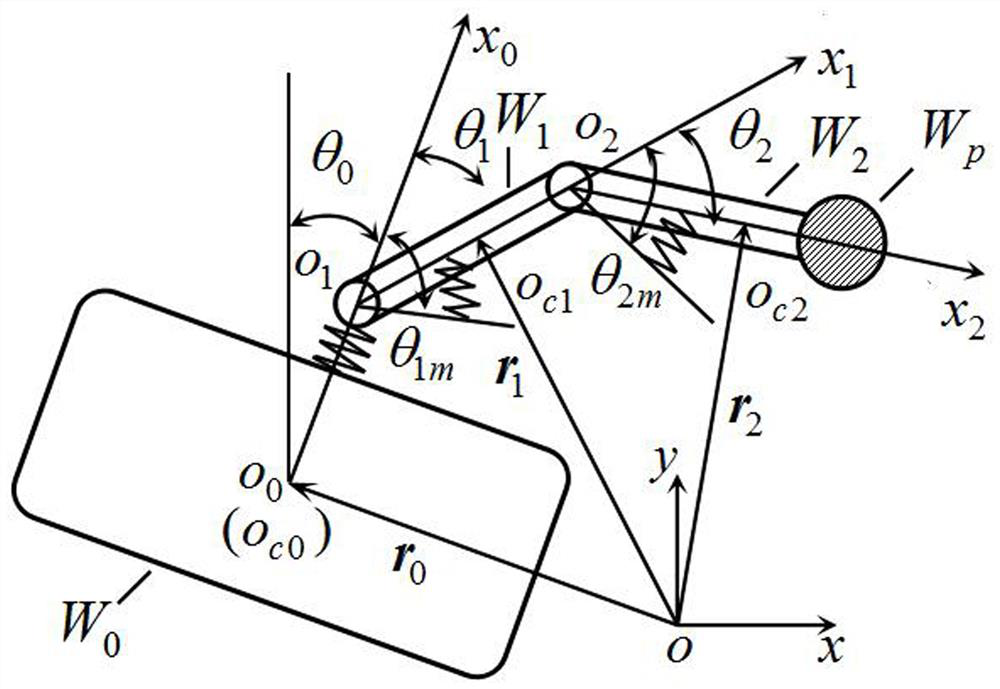
[0087] In this implementation, if figure 1 As shown, it is a planar two-link floating dual flexible space manipulator model. m i 、J i W respectively i (i=0,1,2) mass, moment of inertia, m p 、J p W respectively p mass and moment of inertia; k 0 and k im (i=1, 2) are the stiffness coefficients of the linear telescopic spring of the base and the linear torsion spring of the i-th joint, respectively. The inertial parameters of the space manipulator and the initial configuration of the expected trajectory are shown in Table 1 and Table 2. q=[θ 0 ,θ 1 ,θ 2 ] T is the column vector composed of the attitude angle of the system base and the rotation angle of the two connecting rods, θ m =[θ 1m ,θ 2m ] T is the column vector composed of the drive motor rotation angle at the flexible joint, x′ is the base along x 0 The amount of li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More