Three-stage convolutional neural network-based object grabbing detection method
A convolutional neural network and detection method technology, applied in the field of object grasping detection based on three-level convolutional neural network, can solve the problems of low grasping point accuracy, unable to obtain grasping points of unknown objects, etc. The effect of small search range and strong generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
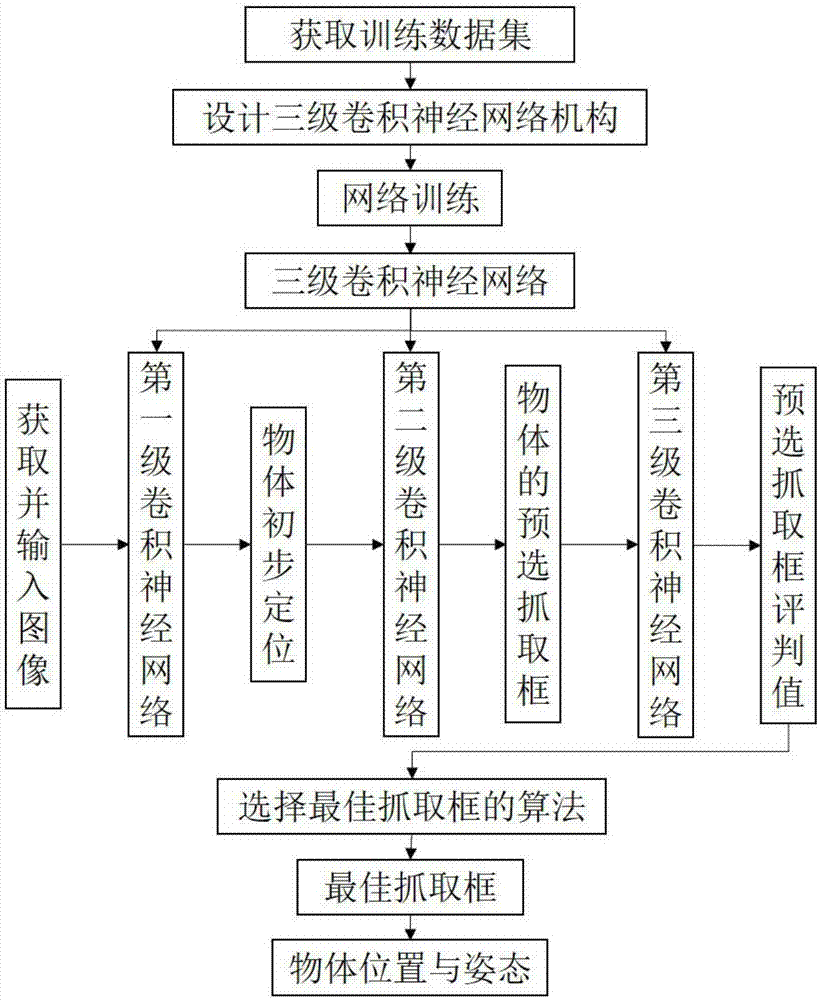
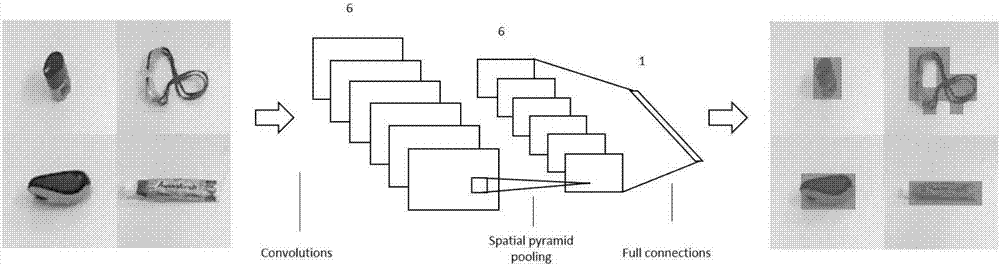
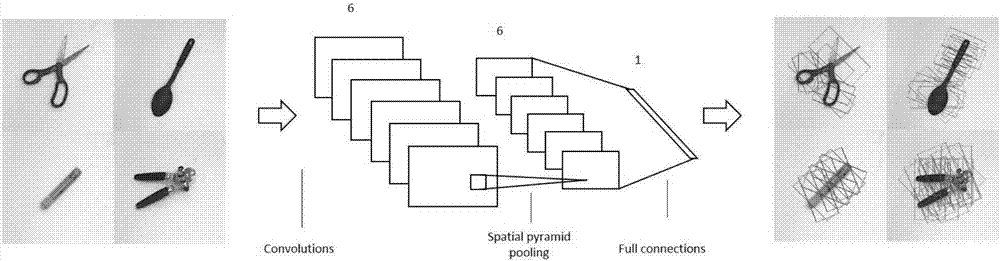
[0057] In this example, if figure 1 As shown, an object grasping detection method based on a three-level convolutional neural network is applied to an object grasping operation composed of a robot, a camera, and a target. The object grasping detection method includes: obtaining a training data set , construct the network structure of the first-level, second-level and third-level convolutional neural networks, select the best capture frame, and determine the position and posture of the object. Among them, for the three-level convolutional neural network, the first-level network is used to initially locate the object and determine the position for the next-level convolutional neural network to search for the grabbing frame; the second-level network is used to obtain the pre-selected grabbing frame for comparison. The small network acquires fewer features, so as to quickly find out the available grasping frames of the object and eliminate the unavailable grasping frames; the thir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More