

UAV automatic tracking method, UAV automatic tracking device and UAV
An automatic tracking and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of increasing the weight of unmanned aerial vehicles and increasing the cost of unmanned aerial vehicles, and achieve the effect of automatic following.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
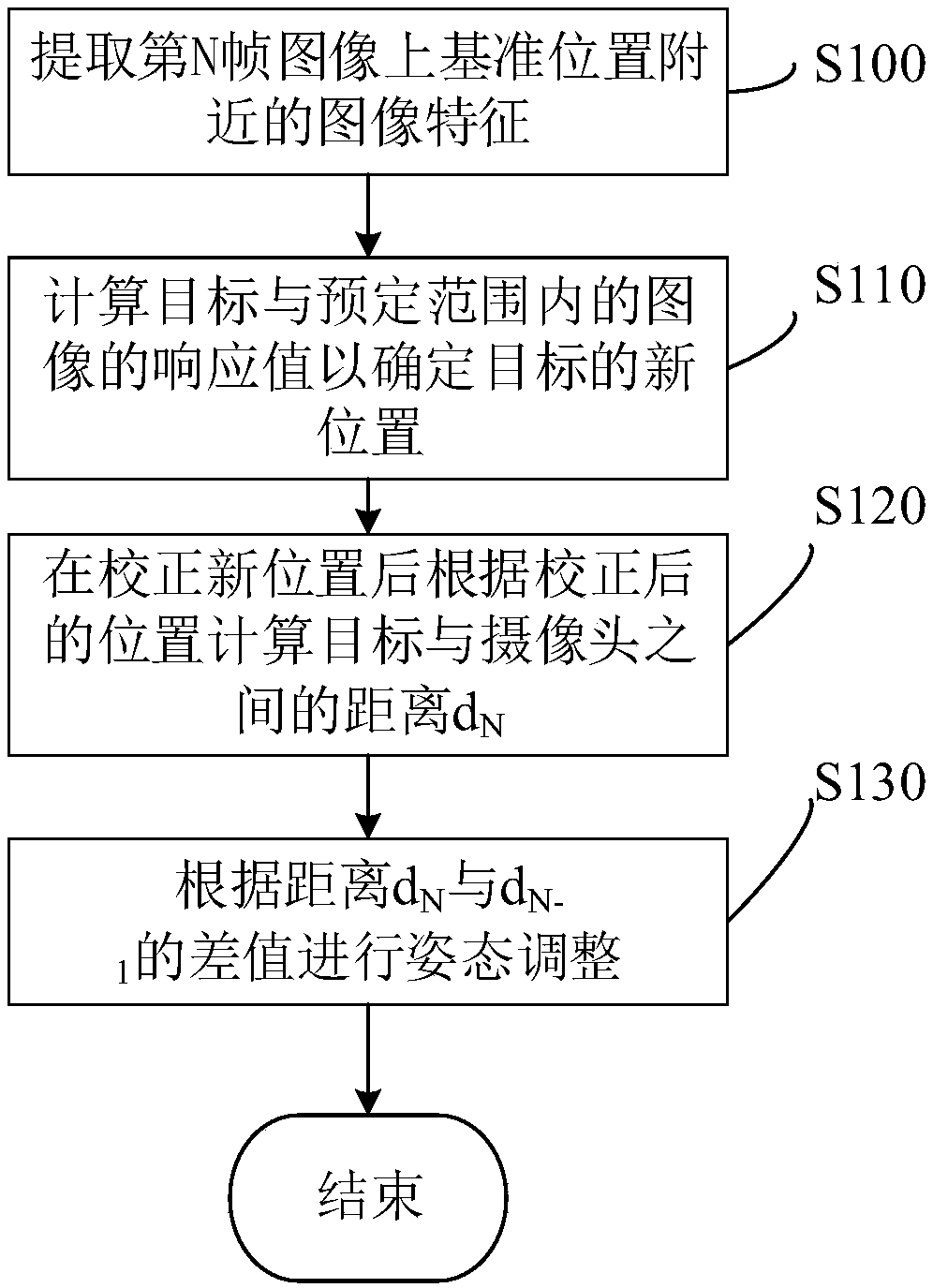
[0039] figure 1 It is a schematic flowchart of an embodiment of the UAV automatic tracking method of the present invention.
[0040] In step S100, taking the position of the target in the N-1th frame image as the reference position, extracting the features of the image within a predetermined range near the reference position of the Nth frame image, where N is greater than or equal to 2 A natural number; in step S110, calculate the response value between the target and the images within the predetermined range and use the maximum response value as the new position of the target.
[0041] For example, extract the features of the sub-window image near the target frame of the next frame image, and detect the maximum classifier response value, and use the position of the maximum response value as the tracking result. More specifically, the position of the target in the previous frame image is used as the reference position, and a predetermined ratio (for example, 1.5 times) is exp...
Embodiment 2
[0074] Figure 5 It is a schematic block diagram of an embodiment of the UAV automatic tracking device of the present invention.
[0075] Figure 5 The unmanned aerial vehicle automatic tracking device 500 in, comprises:
[0076] The feature extraction module 510, taking the position of the target in the N-1th frame image as a reference position, extracts the features of the image within a predetermined range near the reference position of the Nth frame image, and the N is greater than or equal to 2 Natural number;
[0077] Response value calculation module 520, calculating the response value between the target and the image within the predetermined range and taking the maximum response value as the new position of the target;
[0078] The distance calculation module 530 calculates the distance d between the target and the camera according to the corrected position after correcting the new position N ;
[0079] Attitude adjustment module 540, according to the distance d ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More