V-shaped upward-opening-type line-hanging traveling mechanism of inspection robot
A line inspection robot and walking mechanism technology, applied in motor vehicles, overhead lines/cable equipment, transportation and packaging, etc., can solve the problem of wire ropes stuck in non-moving parts, high consistency requirements, and affecting the power transmission of line inspection robots Line maintenance work and other issues, achieve the effect of low detection accuracy requirements, reduce development difficulty and cost, and easy to compile and design control algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The content of the present invention will be further described below in conjunction with the drawings, but the actual manufacturing structure of the present invention is not limited to the embodiments shown in the drawings.
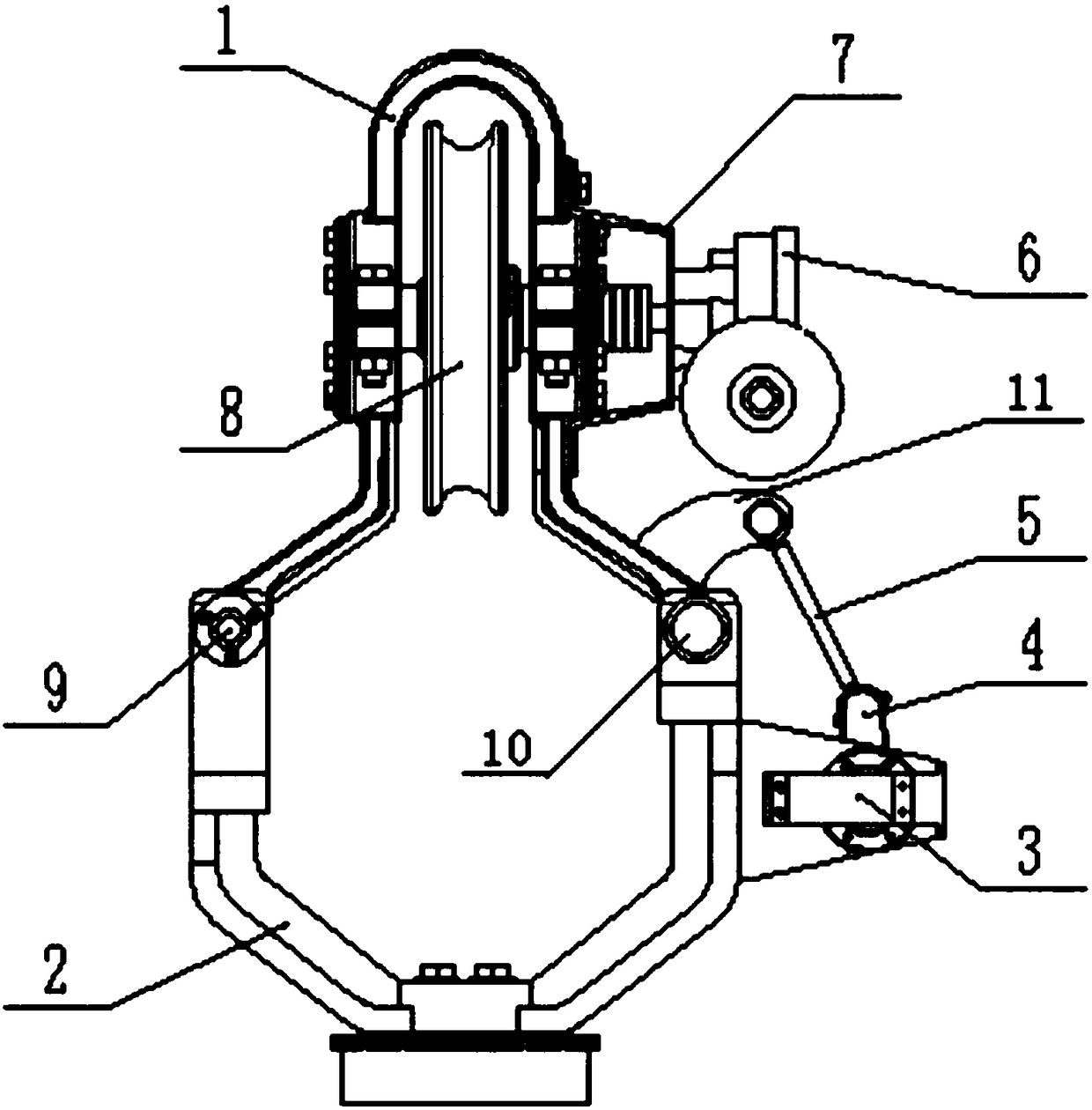
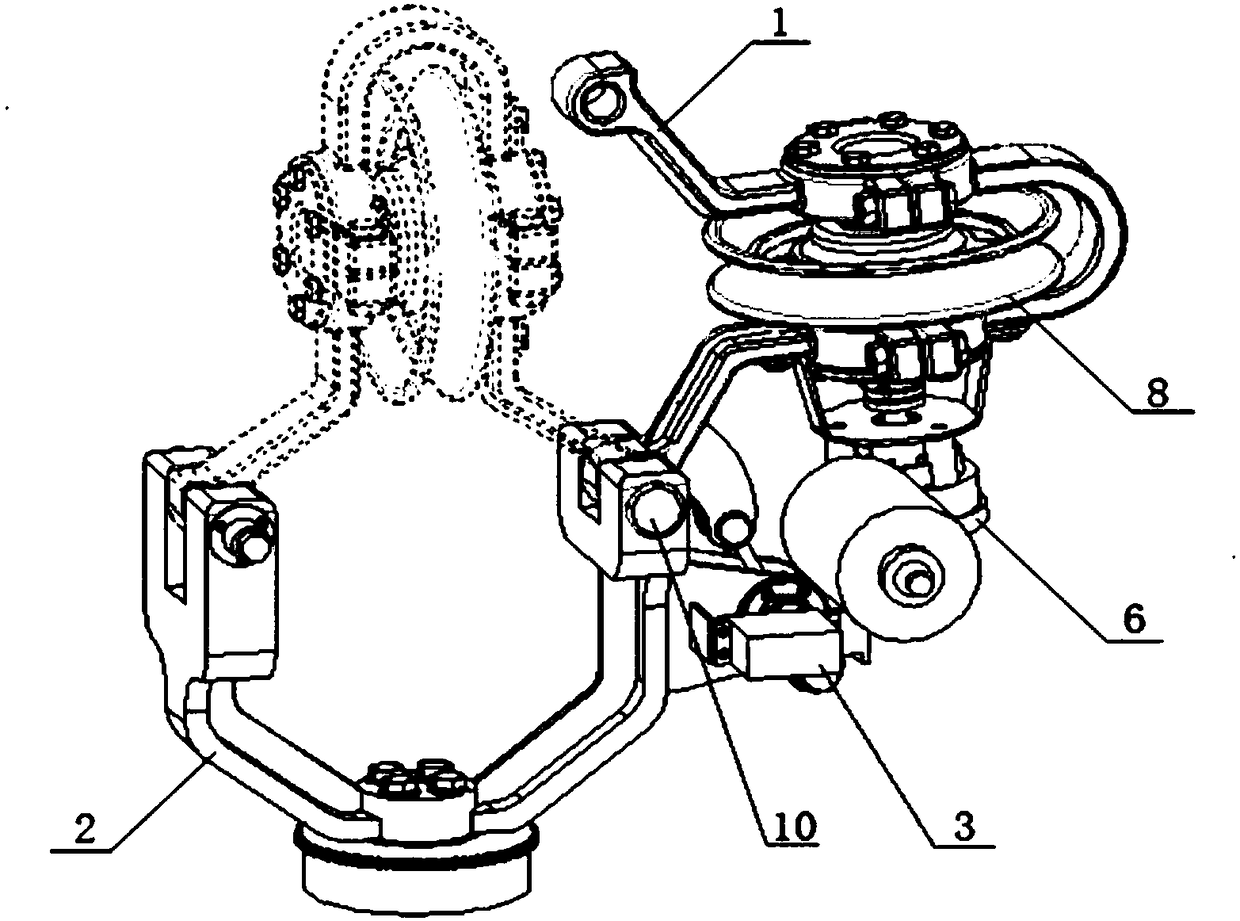
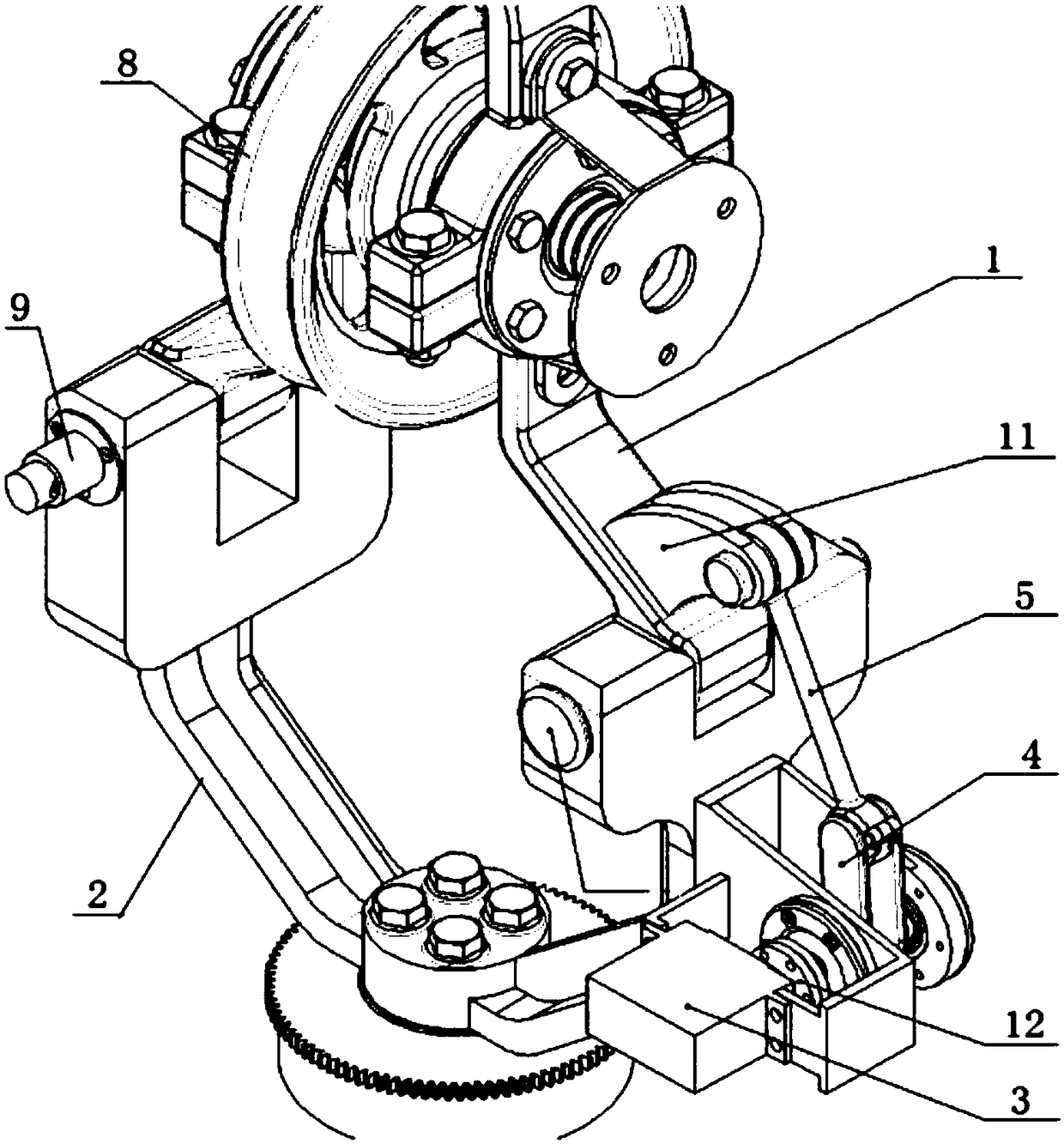
[0018] Referring to the accompanying drawings, the V-type top-opening hanging wire walking mechanism of the line patrol robot according to the present invention is mainly composed of an upper gripper 1 and a lower gripper 2 . The upper gripper 1 is composed of an inverted V-shaped bracket, and a bearing support is arranged symmetrically on both sides of the inverted V-shaped bracket. The shaft rod of the walking wheel 8 is mounted on the two bearing supports. The frame bar of the bracket is equipped with a motor support 7, and the driving motor 6 is installed on the motor support 7, and its output shaft is connected with the shaft rod of the walking wheel 8 through a coupling; the lower grip 2 adopts a U-shaped support design, and its The bottom is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More