

Visual SLAM loopback detection method based on random forest
A technology of random forests and detection methods, applied in neural learning methods, computer parts, instruments, etc., can solve the problems of large amount of calculation, high mismatch rate, poor real-time performance, etc., and achieve the effect of improving positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
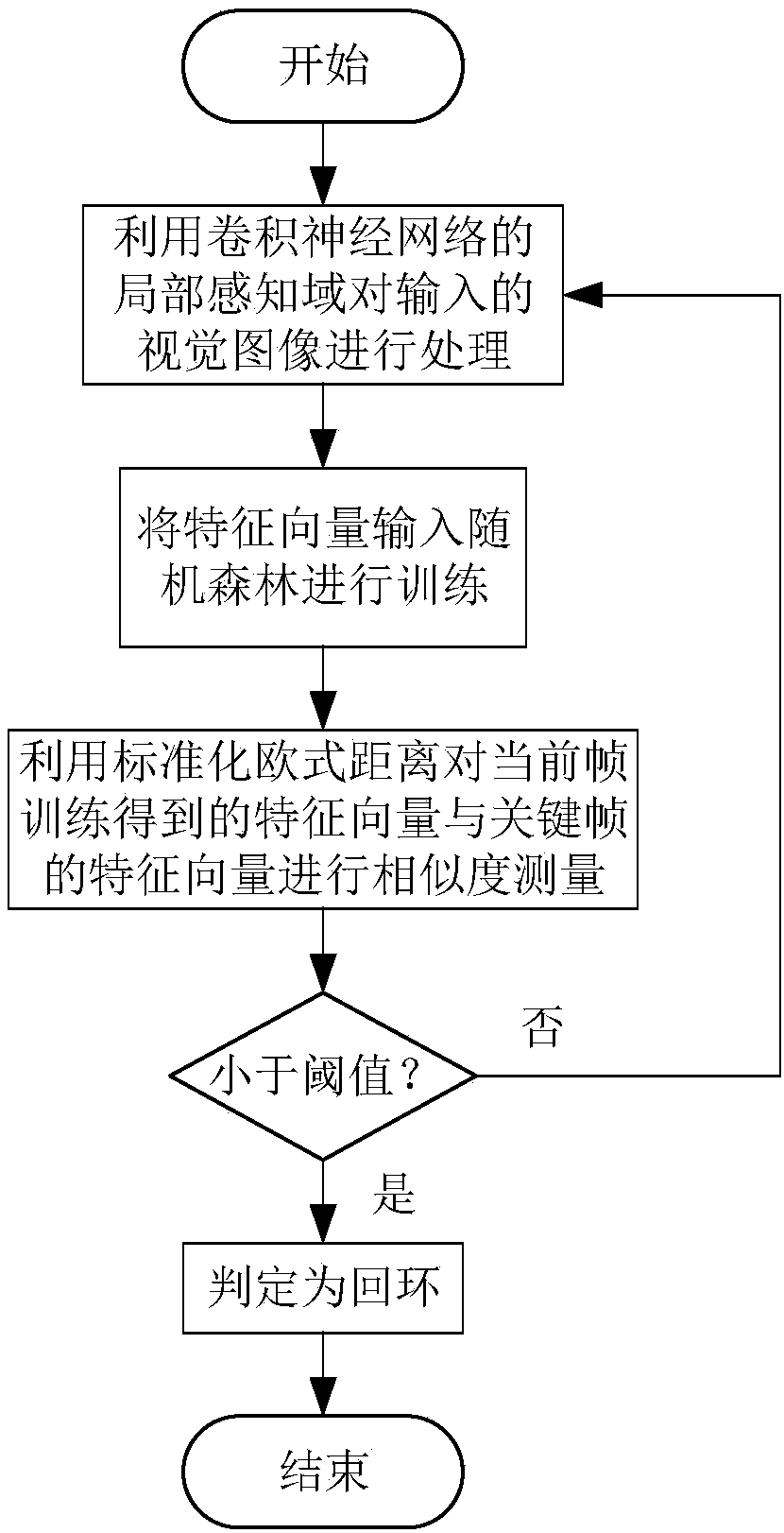
[0035] The platform of implementation mode is: linux operating system, ROS system, flow process such as figure 1 Shown:
[0036] (1) Use the local perceptual domain of the convolutional neural network to extract visual features, that is, the input layer of the convolutional neural network is regarded as neurons arranged in a multidimensional matrix, and the input visual image is processed, and the output of the first hidden layer is used as the visual The feature matrix of the image.
[0037] Assuming the size of the visual image is M×N, the local perceptual field size of the convolutional neural network is m×m. The collected visual image is processed by using the local perception domain of the convolutional neural network, and the obtained feature matrix is: F i =(M-m+1)×(N-m+1)
[0038] where F i Indicates the feature matrix obtained after t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More