Path planning method and system applied to various parking scenes and medium
A path planning and scene technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the lack of initialization methods, discrete point constraint violations are not considered, path planning methods cannot be applied to various parking scene path planning, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] Specific embodiments of the present invention are described with reference to the above drawings.
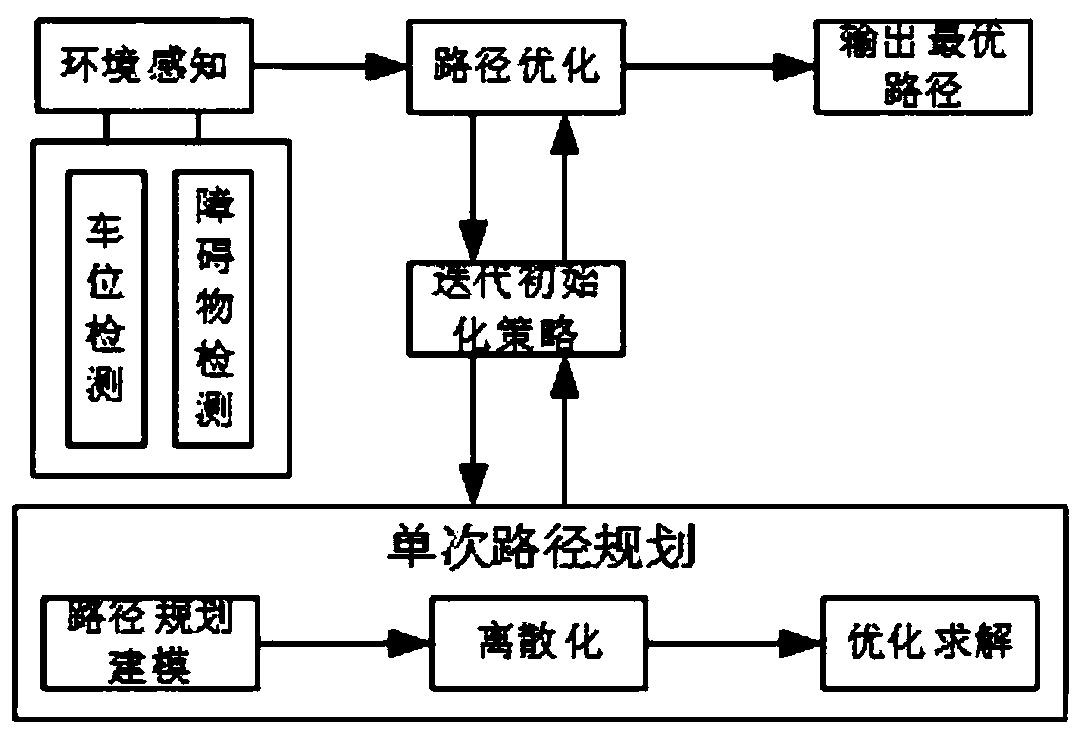
[0080] Depend on figure 1 It can be seen that the present invention provides a path planning method for various parking scenarios, including an environment perception module, a path optimization module, a single path planning module, and an output module. The environment perception module includes a parking space detection module and an obstacle detection module. The parking space detection module judges the parking situation of the parking space, the obstacle detection module judges and detects the surrounding obstacles, and the single path planning module includes a sequential connection path planning modeling module, discretization module, and optimization solution module.
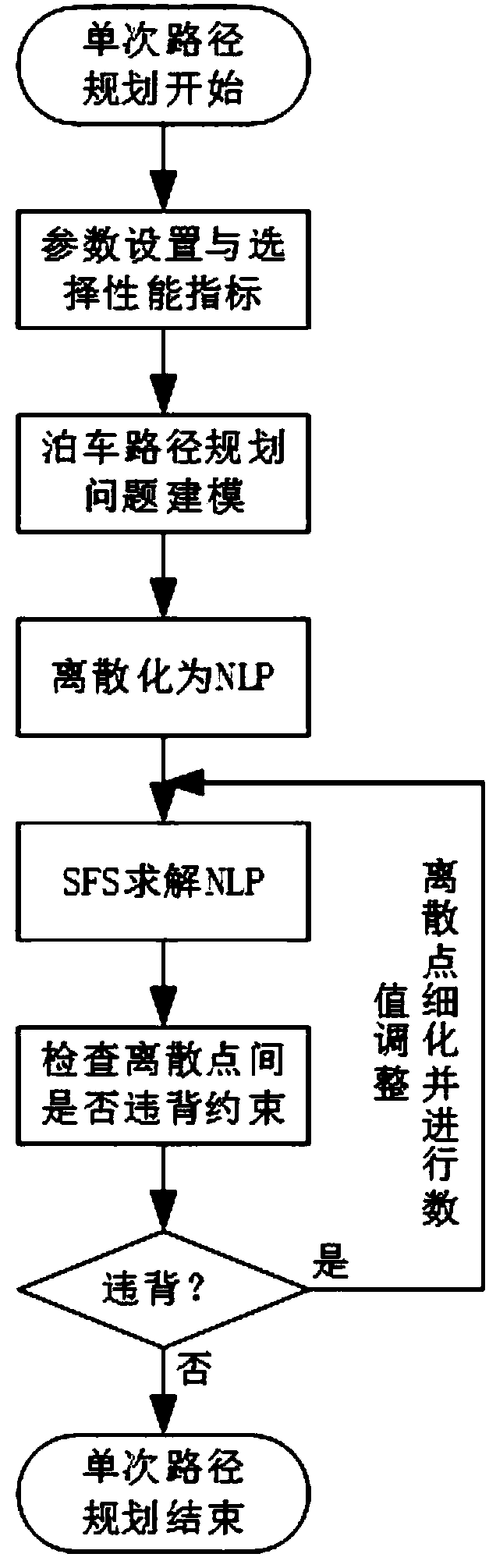
[0081] Depend on figure 1 with figure 2 It can be seen that the present invention also provides a method for path planning of multiple parking scenarios, the method comprising the following step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More